使用node-red+opencv+mqtt实现相机图像云端查看
一、本机环境
jetson nano ubuntu20.04
python 3.12
pip install opencv-python paho-mqtt安装并启动mqtt broker
# 安装 Mosquitto
sudo apt update
sudo apt install mosquitto mosquitto-clients -y# 启动并设置开机自启
sudo systemctl enable mosquitto
sudo systemctl start mosquitto# 验证是否运行
sudo systemctl status mosquitto二、制作方法
mqtt broker启动成功后,执行这个python脚本
# script.py
import cv2
import paho.mqtt.client as mqtt
import base64
import time# MQTT 配置
MQTT_BROKER = "localhost"
MQTT_PORT = 1883
MQTT_TOPIC = "camera/image"# 打开摄像头
cap = cv2.VideoCapture(0)
if not cap.isOpened():print("无法打开摄像头")exit()# 指定 callback_api_version
client = mqtt.Client(callback_api_version=mqtt.CallbackAPIVersion.VERSION2)# 连接 MQTT
try:client.connect(MQTT_BROKER, MQTT_PORT, 60)client.loop_start() # 启动后台线程处理网络通信
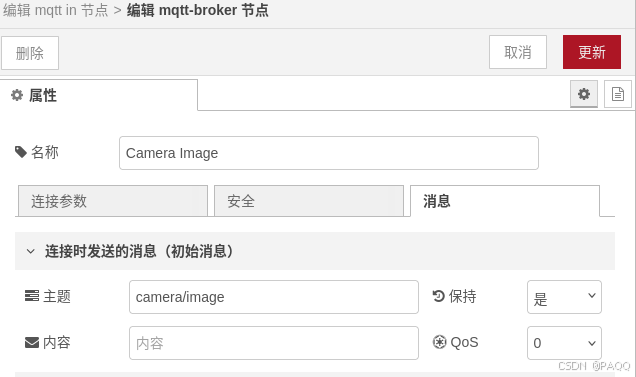
except Exception as e:print(f"MQTT 连接失败: {e}")exit()print("摄像头启动,开始发布图像...")try:while True:ret, frame = cap.read()if not ret:print("摄像头读取失败")break# 缩放图像(减小带宽)frame = cv2.resize(frame, (640, 480))# 编码为 JPEG_, buffer = cv2.imencode('.jpg', frame, [cv2.IMWRITE_JPEG_QUALITY, 80])# 转为 Base64 字符串jpg_as_text = base64.b64encode(buffer).decode('utf-8')# 发布到 MQTTresult = client.publish(MQTT_TOPIC, jpg_as_text, qos=0)# 可选:检查是否发布成功# if result.rc != mqtt.MQTT_ERR_SUCCESS:# print("发布失败")time.sleep(0.1) # 控制帧率(约10fps)except KeyboardInterrupt:print("\n停止发布")finally:cap.release()client.loop_stop() # 停止后台线程client.disconnect()在node-red端则需要两个节点,一个是mqtt_in 和 ui_template节点,mqtt_in节点需要配置与python端一致的话题和端口


ui_template 则需要输入以下代码:
<div style="text-align: center;"><img ng-src="data:image/jpeg;base64,{{msg.payload}}" style="max-width: 100%; height: auto; border: 1px solid #ccc; border-radius: 8px;"alt="Camera Stream"><p style="font-size: 12px; color: #666;">Last update: {{ $flow.lastUpdate }}</p>
</div><script>
// 更新时间戳
(function(scope) {scope.$watch('msg', function(msg) {if (msg) {scope.$flow.lastUpdate = new Date().toLocaleTimeString();}});
})(scope);
</script>部署后,mqtt_in连接上服务器就对了

然后输入 127.0.0.1:1880/ui 进入ui界面,即可查看相机图像,也可通过远程ip访问查看
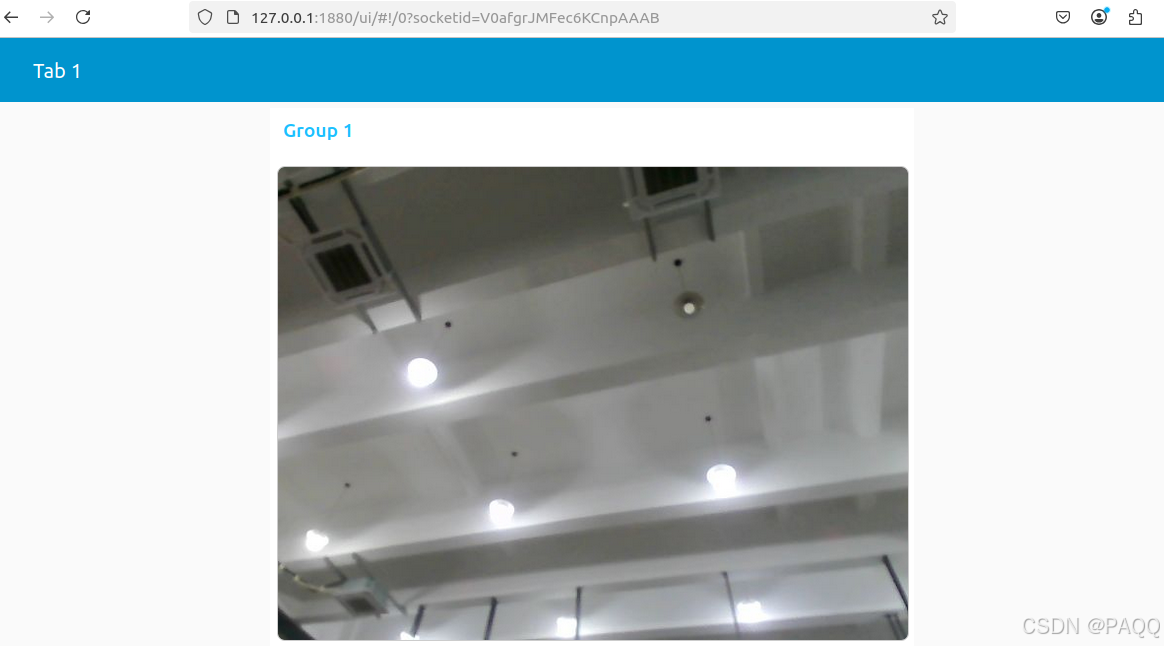
可以调整python端控制帧率的time.sleep函数,达到实时传输