论文阅读-单目视觉惯性系统时间标定
引言
已有研究在单目视觉方法上取得优异成果,能够估计出准确的相机运动与比例模糊的环境结构。为解决比例模糊问题,多传感器融合成为研究热点。尤其是将相机与IMU(惯性测量单元)结合,在实现6自由度SLAM(同时定位与建图)方面展现出卓越性能。
IMU可以提供俯仰角与比例信息,还能在视觉跟踪失败时进行补偿,从而增强系统稳定性。
IMU通常包含 三轴陀螺仪 和 三轴加速度计,通过传感器融合(如卡尔曼滤波)可估算物体的 三维姿态:
- 陀螺仪:测量角速度,通过积分可得到姿态变化(但存在漂移误差)。
- 加速度计:测量重力方向。当车辆静止或匀速运动时,重力分量在车体坐标系中的分布可直接推算出俯仰角(前后倾斜)和横滚角(左右倾斜)。
- 磁力计(如有):提供航向角(偏航角)参考,辅助校准。
在视觉SLAM(如VIO视觉惯性里程计)中,单目摄像头无法直接感知环境的实际尺度(即距离的绝对值),而IMU通过加速度计提供的加速度信息(需二次积分得到位移)可以帮助恢复尺度信息。例如:
单目视觉SLAM的初始地图是“无尺度”的(比如只能确定物体A比物体B远2倍,但不知具体多少米),而IMU通过重力加速度和运动加速度的测量,可推断出实际位移的比例尺(Scale Factor),将地图从“相对比例”校正到“真实比例”。
为什么IMU能提供尺度?
IMU的加速度计测量的是实际物理加速度(单位:m/s²),通过对时间积分可得到实际位移(米),从而为视觉估计的相对运动提供尺度基准。
在进行多传感器融合时,不同传感器的时间戳必须精确同步。但在实际中,传感器时间戳常因触发延迟、传输延迟等问题而与采样时间不符,从而导致时间不同步(时间偏移)。这种时间偏移会对融合系统造成致命影响,尤其是在低成本或DIY的视觉-惯性系统中,由于缺乏硬件同步机制,时间偏移问题普遍存在。
为此,本文提出一种视觉-惯性系统中在线标定时间偏移的方法。我们将时间偏移建模为一个常数但未知的变量,并在SLAM系统中与相机与IMU状态、特征点位置一同进行在线估计。所提时间偏移标定方法是一个通用因子,可方便嵌入各种基于特征的优化框架。虽然本文使用单目视觉-惯性系统进行展示,但方法本身适用于多相机系统。主要贡献如下:
-
提出一种用于视觉-惯性系统中相机与IMU时间偏移的在线标定方法;
-
通过仿真与真实实验展示在线标定的重要性;
-
标定方法已集成至开源项目中。
相关工作
大多数视觉-惯性算法使用稀疏特征而非密集图像处理。例如,[9], [10], [18]使用了“无结构视觉因子”,通过将视觉残差投影至空域中消除特征点,从而专注于相机或IMU的运动估计而非特征位置。而[13], [14], [16]则保留关键帧与特征点,并联合优化相机运动与特征位置。
已有若干研究关注时间偏移的标定。例如,Mair等人[19]提出了一种初始化方法,结合互相关与相位一致性实现时空标定,将待标定变量从其他未知量中分离,提供良好先验。Kelly等人[20]通过对齐相机与IMU的旋转曲线,并结合ICP(迭代最近点)方法逐步匹配,完成时间偏移标定。Kalibr工具箱[21]则在连续批量优化过程中估计时间偏移、相机运动与相机-IMU间外参,是一种广泛使用的离线方法。该工具依赖平面标定图案(如棋盘格),可获得稳健的特征跟踪与三维位置。
此外,Li等人[22]在多状态约束EKF框架中,提出了一种具备在线标定能力的相机-IMU运动估计方法。该方法在计算复杂度上具备优势,适用于移动设备。相比之下,本文基于优化的算法在精度方面更具优势,因为我们可在大型优化窗中迭代更新多个变量,避免过早线性化误差固定。
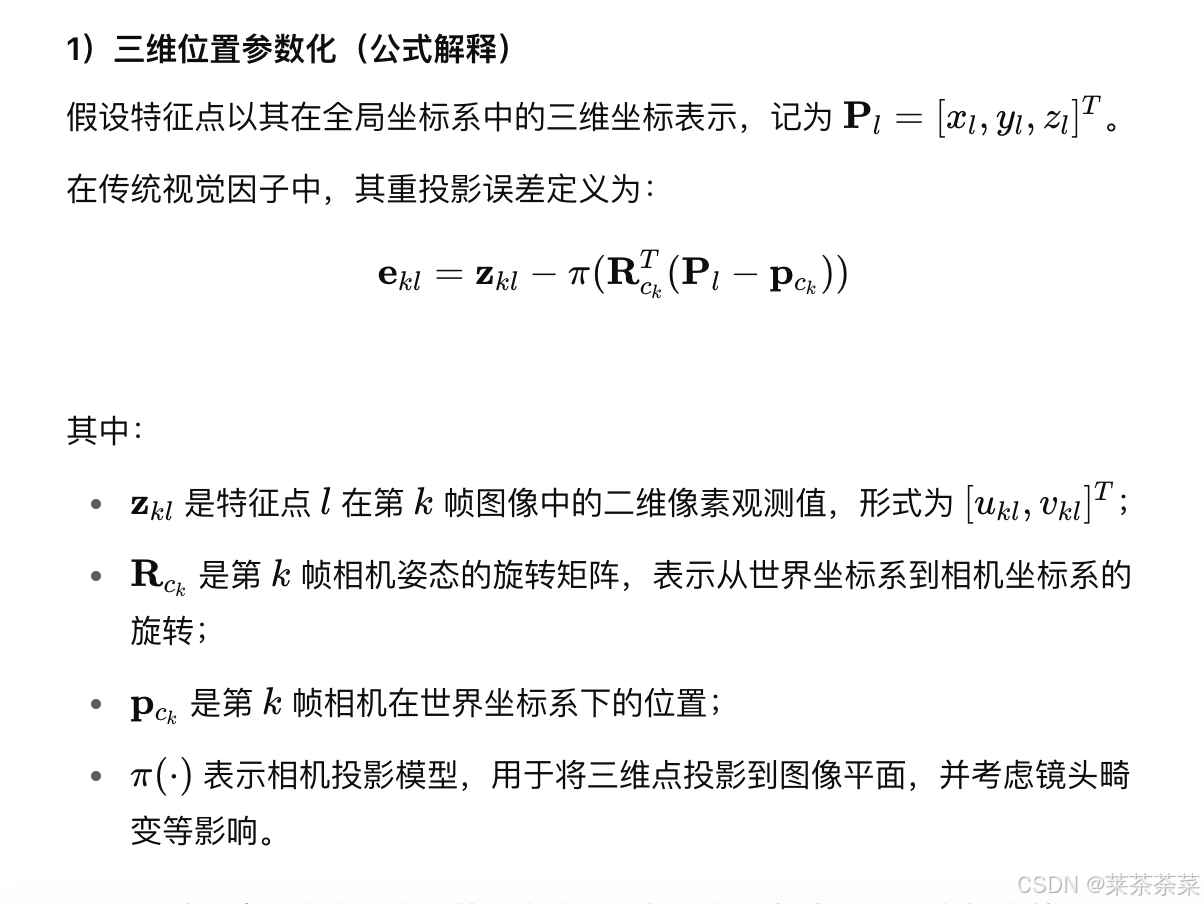
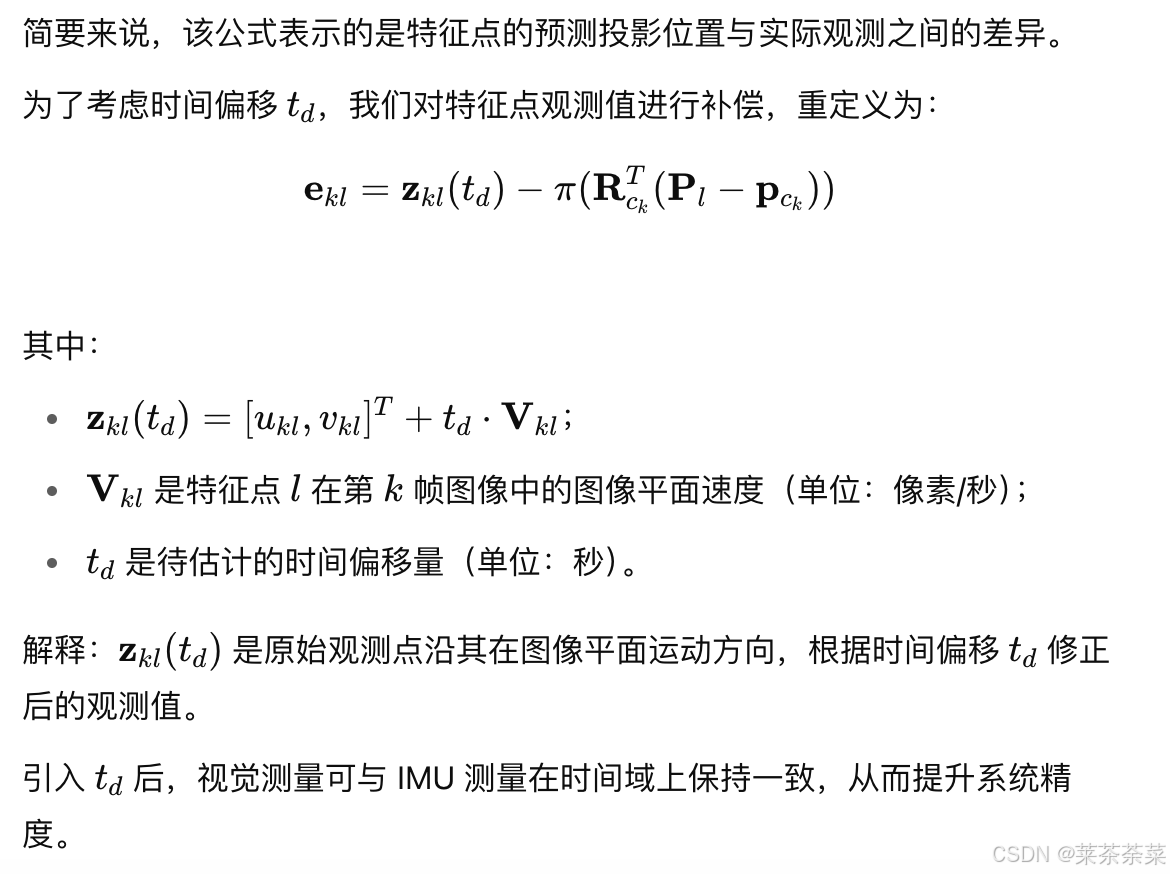
算法
实验结果
数据集
EuRoC MAV 数据集是一个公开的、多场景、带地面真值的视觉-惯性导航评估数据集,主要用于评估 SLAM / VIO 系统的性能。它包括三个不同环境的飞行记录,每个环境下有多个子序列:
| 环境代号 | 含义 | 子序列名(示例) |
|---|---|---|
| MH | Machine Hall(工厂车间) | MH_01、MH_02、MH_03 等 |
| V1 | Vicon Room 1(室内实验) | V1_01、V1_02、V1_03 等 |
| V2 | Vicon Room 2 | V2_01、V2_02 |
我们使用 EuRoC MAV 视觉-惯性数据集 [27] 评估所提时间标定方法对整体 VIO 性能的影响。该数据集由微型飞行器采集,包含:
立体图像(Aptina MT9V034 全局快门,WVGA,单通道,20 FPS),
IMU 数据(ADIS16448,200 Hz),
地面真值(由 VICON 与 Leica MS50 提供)。
本实验仅使用左侧相机图像。该数据集已知相机与 IMU 精确同步。
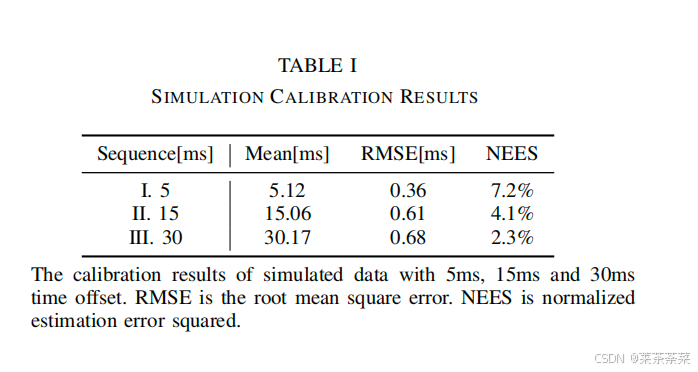
为了评估时间偏移的影响,我们人为将 IMU 时间戳整体平移(±5ms 到 ±40ms),构造具有不同时间偏移的测试序列。
我们首先分析偏移对基础方法(VINS-Mono [23])的影响。图示结果表明,VINS-Mono 对时间偏移极为敏感,RMSE 在 ±6ms 以外急剧上升。而加入所提时间标定方法后,RMSE 在不同时间偏移下保持稳定,表明本方法能有效消除时间偏移带来的误差。
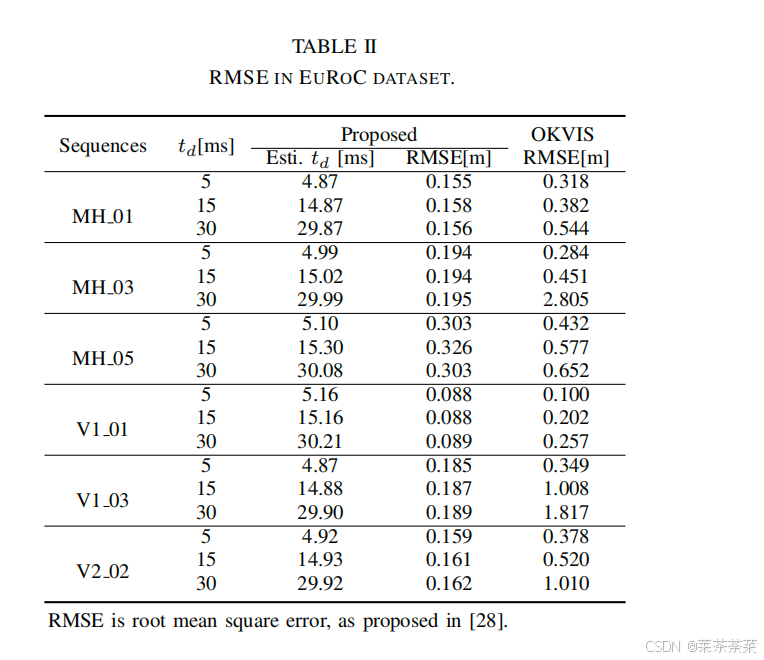
随后,我们与 OKVIS [16] 方法进行对比。表格 II 展示了在多个 EuRoC 序列中设置不同偏移(5ms、15ms、30ms)后,OKVIS 与本文方法的 RMSE 对比:
总结
本文提出了一种在线标定视觉-惯性系统中相机与 IMU 之间时间偏移的方法。该方法将时间偏移视作一个待估参数,联合优化相机状态、IMU 状态与特征点位置,以实现高精度的时间同步。
该方法具备以下优势:
通用性强,可嵌入多种基于优化的 VIO 框架中;
无需额外标定图案,如棋盘格即可在线运行,适合实际部署;
实验显示,其标定精度与 Kalibr 等离线工具相当,甚至在稳定性和实时性方面更具优势;
在 EuRoC 与实际场景测试中表现出优异的鲁棒性与轨迹精度。
虽然本文使用的是单目视觉-惯性系统,但所提出的方法也适用于多相机系统。其源码已集成于 VINS-Mono 项目中,便于学术与工程实践应用。
我的反思
本文提出了一种在线时间偏移标定方法,用于视觉-惯性系统(VIO)中**相机与 IMU 数据时间不同步(即时间偏移)**的场景。
该方法的核心思想是:
将时间偏移 𝑡_d作为一个 待优化的变量,与其他状态(IMU、相机位姿、特征点)联合建模并优化,实现在线实时校正。
🧩 关键组成模块
- 滑动窗口优化结构(Sliding Window BA)
系统采用的是滑动窗口式局部非线性优化,典型特征如下:
-
窗口中保留固定数量(如7~10个)的相机帧与IMU状态;
-
对窗口内的:相机位姿、IMU偏置、速度、特征点位置及时间偏移进行联合优化;
-
窗口外的历史信息通过**边缘化(Marginalization)**保留为先验残差,避免信息损失。
🔁 时间偏移的动态更新策略
每轮优化完成后:
系统将当前优化得到的 𝑡_d 应用至下一轮图像帧时间戳;
并继续估计剩余时间差 𝛿_𝑡,进行下一轮修正;
即通过“边运行边补偿”,逐步将大偏移收敛到零。
该机制保证即便初始偏移高达数百毫秒,也可从粗到精逐步矫正。
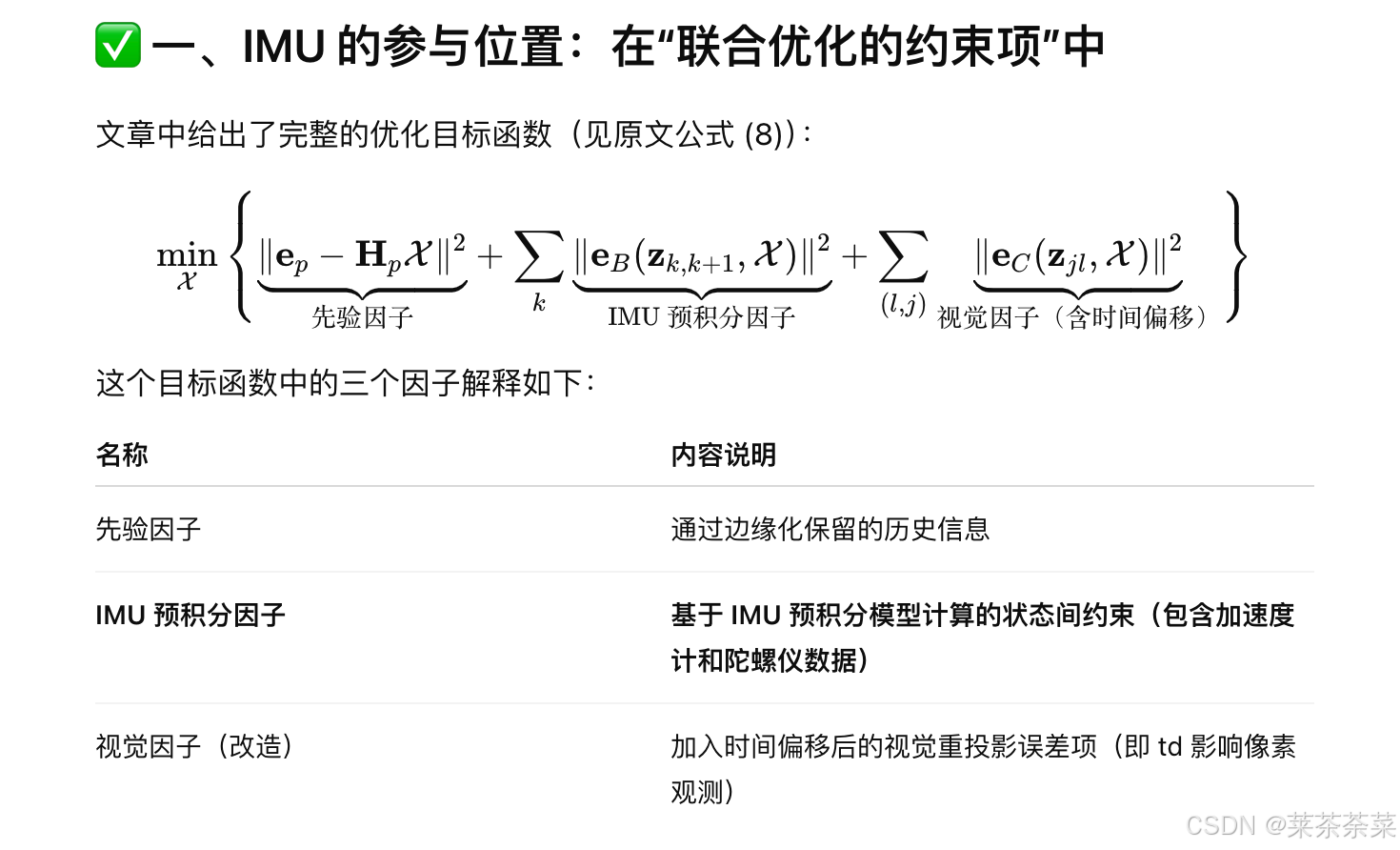
所以说,虽然视觉因子的公式看起来“只动了图像点”,但优化目标函数中IMU 是等权参与者,且正是因为 IMU 与视觉的张力,才使得 𝑡_𝑑能被精确估计。
代码阅读
代码结构
VINS-Fusion-master/
├── .gitignore
├── LICENCE
├── README.md
├── camera_models/
├── config/
│ ├── A3_ptgrey/
│ ├── euroc/
│ ├── extrinsic_parameter_example.pdf
│ ├── fisheye_mask.jpg
│ ├── fisheye_mask_752x480.jpg
│ ├── kitti_odom/
│ ├── kitti_raw/
│ ├── mynteye/
│ ├── realsense_d435i/
│ ├── simulation/
│ ├── vi_car/
│ └── vins_rviz_config.rviz
├── docker/
├── global_fusion/
├── loop_fusion/
├── support_files/
└── vins_estimator/
├── CMakeLists.txt
├── cmake/
├── launch/
├── package.xml
└── src/
├── KITTIGPSTest.cpp
├── KITTIOdomTest.cpp
├── estimator/
│ ├── estimator.cpp
│ ├── estimator.h
│ ├── feature_manager.cpp
│ ├── feature_manager.h
│ ├── parameters.cpp
│ └── parameters.h
├── factor/
├── featureTracker/
├── initial/
├── rosNodeTest.cpp
└── utility/
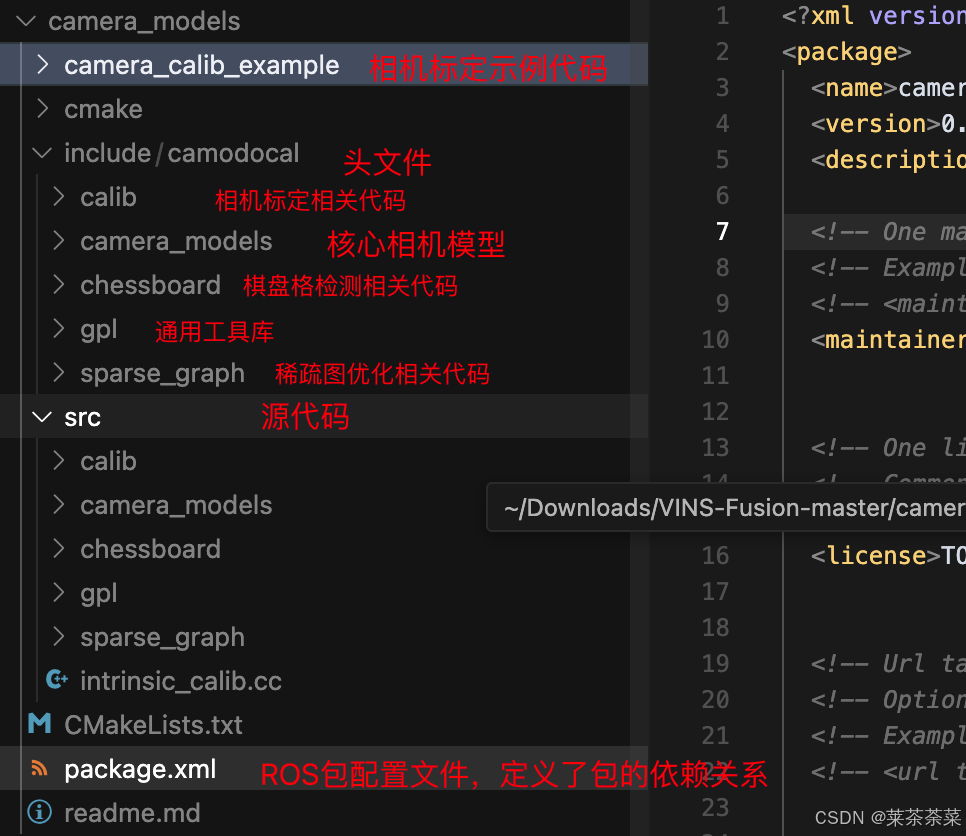
camera_models
这个模块的主要功能是提供多种相机模型的实现,包括:
- 标准针孔相机模型
- 带畸变的针孔相机模型
- 鱼眼相机模型(等距和 Scaramuzza 模型)
- 等距投影相机模型
提供相机标定功能:
- 支持使用棋盘格进行相机标定
- 提供标定示例代码
- 使用 Google Ceres 求解器进行优化
提供相机模型的基本操作:
- 3D点投影到图像平面
- 图像平面点反投影到3D空间
- 支持不同相机模型的参数优化
这个模块是 VINS-Fusion 中处理相机模型和标定的重要组件,为整个系统提供了准确的相机模型支持,这对于视觉SLAM系统的精度至关重要。
config
config/ 目录保存了 VINS-Fusion 运行时所需的全部配置文件,主要分为三类:
① 各类相机硬件(Point Grey、Mynt Eye、Realsense D435i 等)的标定与运行参数;
② 针对公开数据集(EuRoC、KITTI、仿真等)的参数模板;
③ 通用辅助文件(外参说明、鱼眼掩码、RViz 可视化配置)。
config/
├── A3_ptgrey/ # Point Grey 相机
│ ├── left.yaml / right.yaml # 左/右相机内参
│ ├── a3_ptgrey_mono_imu_config.yaml # 单目+IMU 运行参数
│ ├── a3_ptgrey_stereo_config.yaml # 双目(无 IMU)
│ ├── a3_ptgrey_stereo_imu_config.yaml # 双目+IMU(常用)
│ └── a3_ptgrey_stereo_imu_config_backup.yaml # 备份
│
├── euroc/ # EuRoC MAV 数据集
│ ├── cam0_mei.yaml / cam1_mei.yaml # Mei 鱼眼模型内参
│ ├── cam0_pinhole.yaml / cam1_pinhole.yaml # Pinhole 模型内参
│ ├── euroc_mono_imu_config.yaml # 单目+IMU
│ ├── euroc_stereo_config.yaml # 双目(无 IMU)
│ └── euroc_stereo_imu_config.yaml # 双目+IMU(官方推荐)
│
├── kitti_odom/ # KITTI 里程计序列 (00-21)
│ ├── cam00-02.yaml / cam03.yaml … # 不同序列相机内参
│ ├── kitti_config00-02.yaml # 00-02 号序列完整配置
│ ├── kitti_config03.yaml
│ ├── kitti_config04-12.yaml
│ └── kitti_config13-21.yaml # 针对每段序列微调的外参
│
├── kitti_raw/ # KITTI 原始(raw)数据
│ ├── cam_09_30.yaml / cam_10_03.yaml # 不同采集日的相机内参
│ ├── kitti_09_30_config.yaml
│ └── kitti_10_03_config.yaml # 对应完整运行配置
│
├── mynteye/ # Mynt Eye S1030
│ ├── left_mei.yaml / right_mei.yaml # 左右鱼眼内参
│ ├── mynteye_mono_imu_config.yaml
│ ├── mynteye_stereo_config.yaml
│ └── mynteye_stereo_imu_config.yaml
│
├── realsense_d435i/ # Intel Realsense D435i
│ ├── left.yaml / right.yaml # 将深度摄像头分左右使用
│ ├── realsense_stereo_imu_config.yaml # D435i 双目+IMU
│ └── rs_camera.launch # ROS 驱动启动文件
│
├── simulation/ # Gazebo/Unity 等仿真场景
│ ├── cam0_mei.yaml / cam1_mei.yaml # 虚拟鱼眼相机内参
│ └── simulation_config.yaml # 仿真环境总体配置
│
├── vi_car/ # 车载双目+IMU(自采集)
│ ├── cam0_mei.yaml / cam1_mei.yaml
│ ├── cam0_pinhole.yaml / cam1_pinhole.yaml # 同一套图像提供两种模型
│ └── vi_car.yaml # 系统运行参数
│
├── extrinsic_parameter_example.pdf # 如何测量/书写外参的说明文档
├── fisheye_mask.jpg # 3680×2760 鱼眼黑边掩码
├── fisheye_mask_752x480.jpg # EuRoC 尺寸的鱼眼掩码
└── vins_rviz_config.rviz # RViz 预设布局(话题、颜色等)
global_fusion
global_fusion/ 实现了“GPS 辅助的全局位姿图优化”。
它将 VINS 局部里程计、回环信息与 GPS/RTK 绝对定位联合优化,输出长时间无漂移的全局轨迹,并自带可视化模型。
global_fusion/ ―― GPS-VIO 全局优化模块(ROS 包)
├── CMakeLists.txt # 构建配置,依赖 ceres、Eigen、roslib 等
├── package.xml # ROS 元信息与依赖声明
├── ThirdParty/
│ └── GeographicLib/ # 嵌入式地理坐标库(精简版)
│ ├── include/Config.h … # WGS-84 常量、坐标变换
│ └── src/Math.cpp … # 纯头/源文件,免去系统安装
├── models/ # 可视化 3D 模型
│ ├── car.dae # 车辆 mesh,用于 RViz 显示
│ └── hummingbird.mesh # 无人机 mesh
└── src/ # 核心源码
├── Factors.h # ceres 残差项定义(GPS/姿态/平滑因子等)
├── globalOpt.h / .cpp # GlobalOptimization 类
│ · 维护滑窗 & 关键帧
│ · 构建 ceres 问题,融合 GPS 与 VIO
├── globalOptNode.cpp # ROS 节点入口
│ · 订阅 /vins_estimator/odometry 与 /gps
│ · 调用 GlobalOptimization 更新 & 求解
│ · 发布 /global_odometry、/global_path
│ · 在 RViz 中加载 car.dae 模型
└── tic_toc.h # 微型计时器宏,统计运行耗时
loop_fusion
loop_fusion/ ―― 回环检测 + 位姿图优化
├── CMakeLists.txt # 构建配置
├── package.xml # ROS 依赖声明
├── cmake/ # 辅助 CMake 脚本
└── src/
├── parameters.h # 运行参数(话题名、滑窗大小等)
├── keyframe.h / .cpp # 关键帧数据结构与管理
├── pose_graph.h / .cpp # 回环位姿图、优化求解(CERES)
├── pose_graph_node.cpp # ROS 节点入口:订阅 VIO、发布闭环后轨迹
├── utility/ # 可视化、计时器、通用工具
│ ├── utility.h / .cpp
│ ├── CameraPoseVisualization.* # RViz 相机位姿显示
│ └── tic_toc.h # 计时宏
└── ThirdParty/ # 第三方词袋库 DBoW2
├── DBoW/ DUtils/ DVision/ # BoW 词向量、匹配/检索实现
└── VocabularyBinary.* # 词典二进制序列化
作用:利用 ORB/BRIEF 描述子 + DBoW2 做回环检测,将回环约束加入位姿图后用 Ceres 进行全局优化,显著降低累计漂移。
vins_estimator
vins_estimator/ ―― VINS-Fusion 核心 VIO 估计器
├── CMakeLists.txt | package.xml | cmake/ | launch/
└── src/
├── KITTIGPSTest.cpp / KITTIOdomTest.cpp # 跑 KITTI 的演示程序
├── rosNodeTest.cpp # 在线 ROS 版本 demo
│
├── estimator/ # VIO 核心
│ ├── estimator.h / .cpp # Sliding-Window BA、滑动窗口管理
│ ├── feature_manager.* # 管理视差/三角化的特征
│ └── parameters.* # 全局参数读取
│
├── factor/ # Ceres 残差块
│ ├── imu_factor.* # IMU 预积分误差
│ ├── projection_factor. # 重投影误差(单目/双目/两帧)
│ ├── marginalization_factor.* # 边缘化实现
│ └── integration_base.h # IMU 预积分基类
│
├── featureTracker/ # 前端特征追踪
│ ├── feature_tracker.* # KLT + 畸变校正
│
├── initial/ # 系统初始化
│ ├── initial_sfm.* # SFM 结构初始化
│ ├── initial_alignment.* # 重力/尺度/速度对齐
│ ├── initial_ex_rotation.* # 外参旋转粗估
│ └── solve_5pts.* # 五点法求解
│
└── utility/ # 工具 & 可视化
├── utility.* # 日志、转换函数
├── tic_toc.h # 计时器
├── visualization.* # RViz 可视化
└── CameraPoseVisualization.* # 相机姿态模型
作用:读取相机/IMU 数据 → KLT 追踪 → 滑窗优化(视觉重投影 + IMU 预积分)→ 输出高频无漂移里程计;该模块也为 loop_fusion / global_fusion 提供里程计输入。
先从主函数开始
#include <stdio.h>
#include <queue>
#include <map>
#include <thread>
#include <mutex>
#include <ros/ros.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/opencv.hpp>
#include "estimator/estimator.h"
#include "estimator/parameters.h"
#include "utility/visualization.h"Estimator estimator; // 全局 Estimator 对象,负责 VIO 核心计算// 四个消息队列,分别缓存 IMU、特征、左/右图像
queue<sensor_msgs::ImuConstPtr> imu_buf;
queue<sensor_msgs::PointCloudConstPtr> feature_buf;
queue<sensor_msgs::ImageConstPtr> img0_buf;
queue<sensor_msgs::ImageConstPtr> img1_buf;
std::mutex m_buf; // 互斥锁// – 将左相机图像(sensor_msgs::ImageConstPtr)推入 img0_buf 队列
void img0_callback(const sensor_msgs::ImageConstPtr &img_msg)
{m_buf.lock();img0_buf.push(img_msg);m_buf.unlock();
}// – 将右相机图像(如果启用双目)推入 img1_buf 队列。
void img1_callback(const sensor_msgs::ImageConstPtr &img_msg)
{m_buf.lock();img1_buf.push(img_msg);m_buf.unlock();
}// 将 ROS 图像消息转换为 OpenCV 的 cv::Mat(若编码为 8UC1,则转为 mono8)cv_bridge 对图像编码有一定要求。如果 ROS 消息的 encoding 是 "8UC1"(非标准命名),cv_bridge::toCvCopy() 会报错,因为它不识别 8UC1。
cv::Mat getImageFromMsg(const sensor_msgs::ImageConstPtr &img_msg)
{cv_bridge::CvImageConstPtr ptr;if (img_msg->encoding == "8UC1"){sensor_msgs::Image img;img.header = img_msg->header;img.height = img_msg->height;img.width = img_msg->width;img.is_bigendian = img_msg->is_bigendian;img.step = img_msg->step;img.data = img_msg->data;img.encoding = "mono8";ptr = cv_bridge::toCvCopy(img, sensor_msgs::image_encodings::MONO8);}elseptr = cv_bridge::toCvCopy(img_msg, sensor_msgs::image_encodings::MONO8);cv::Mat img = ptr->image.clone();return img;
}// extract images with same timestamp from two topics
// 从图像队列中同步提取图像帧
void sync_process()
{while(1){if(STEREO) // 双目{cv::Mat image0, image1;std_msgs::Header header;double time = 0;m_buf.lock();if (!img0_buf.empty() && !img1_buf.empty()){// 获取前端图像的时间戳double time0 = img0_buf.front()->header.stamp.toSec();double time1 = img1_buf.front()->header.stamp.toSec();// 0.003s sync tolerance// 表示左图像比右图像早太多(差 > 3ms),抛弃左图。if(time0 < time1 - 0.003){img0_buf.pop();printf("throw img0\n");}// 表示右图比左图早太多,抛弃右图。else if(time0 > time1 + 0.003){img1_buf.pop();printf("throw img1\n");}// 时间戳差在容忍范围内,认为是“匹配图像对”else{time = img0_buf.front()->header.stamp.toSec();header = img0_buf.front()->header;image0 = getImageFromMsg(img0_buf.front());img0_buf.pop();image1 = getImageFromMsg(img1_buf.front());img1_buf.pop();//printf("find img0 and img1\n");}}m_buf.unlock();if(!image0.empty())// 送入后端估计器处理estimator.inputImage(time, image0, image1);}// 单目else{cv::Mat image;std_msgs::Header header;double time = 0;m_buf.lock();if(!img0_buf.empty()){time = img0_buf.front()->header.stamp.toSec();header = img0_buf.front()->header;image = getImageFromMsg(img0_buf.front());img0_buf.pop();}m_buf.unlock();if(!image.empty())estimator.inputImage(time, image);}// 让当前线程休眠 2 毫秒,避免高频空转 CPU。 std::chrono::milliseconds dura(2);std::this_thread::sleep_for(dura);}
}// 将接收到的 IMU 数据(加速度 + 角速度)提取出来,并传递给前端 VIO 系统的 estimator 处理。
void imu_callback(const sensor_msgs::ImuConstPtr &imu_msg)
{double t = imu_msg->header.stamp.toSec();double dx = imu_msg->linear_acceleration.x;double dy = imu_msg->linear_acceleration.y;double dz = imu_msg->linear_acceleration.z;double rx = imu_msg->angular_velocity.x;double ry = imu_msg->angular_velocity.y;double rz = imu_msg->angular_velocity.z;Vector3d acc(dx, dy, dz);Vector3d gyr(rx, ry, rz);estimator.inputIMU(t, acc, gyr);return;
}// 用于接收视觉前端提取的特征点消息(带ID + 像素 + 速度 + 深度),并将其封装后送入后端 estimator 做 VIO 优化。
void feature_callback(const sensor_msgs::PointCloudConstPtr &feature_msg)
{
// 定义一个 featureFrame 容器:
// key 是 feature_id
// value 是这个特征点在多个相机下的观测(如双目),每个观测是一个:pair<camera_id, [x, y, z, u, v, vx, vy]>map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> featureFrame;for (unsigned int i = 0; i < feature_msg->points.size(); i++){int feature_id = feature_msg->channels[0].values[i]; // 特征点idint camera_id = feature_msg->channels[1].values[i]; // 相机id// 像素归一化坐标 z==1是归一化保证double x = feature_msg->points[i].x;double y = feature_msg->points[i].y;double z = feature_msg->points[i].z;// 像素坐标double p_u = feature_msg->channels[2].values[i];double p_v = feature_msg->channels[3].values[i];// 像素速度(光流)double velocity_x = feature_msg->channels[4].values[i];double velocity_y = feature_msg->channels[5].values[i];if(feature_msg->channels.size() > 5){// 特征点真值坐标double gx = feature_msg->channels[6].values[i];double gy = feature_msg->channels[7].values[i];double gz = feature_msg->channels[8].values[i];pts_gt[feature_id] = Eigen::Vector3d(gx, gy, gz); // 存入全局真值点表//printf("receive pts gt %d %f %f %f\n", feature_id, gx, gy, gz);}// 用于确保该特征的深度是 归一化坐标,也即从图像点 (u, v) 投影成 (x, y, 1)ROS_ASSERT(z == 1);Eigen::Matrix<double, 7, 1> xyz_uv_velocity;xyz_uv_velocity << x, y, z, p_u, p_v, velocity_x, velocity_y;featureFrame[feature_id].emplace_back(camera_id, xyz_uv_velocity);}double t = feature_msg->header.stamp.toSec();// 把该帧所有特征点的信息(featureFrame)+ 时间戳 t,送入后端优化模块 estimatorestimator.inputFeature(t, featureFrame);return;
}// 重启SLAM/VIO系统
void restart_callback(const std_msgs::BoolConstPtr &restart_msg)
{if (restart_msg->data == true){ROS_WARN("restart the estimator!");estimator.clearState();estimator.setParameter();}return;
}// 开启/关闭 IMU 使用
void imu_switch_callback(const std_msgs::BoolConstPtr &switch_msg)
{if (switch_msg->data == true){//ROS_WARN("use IMU!");estimator.changeSensorType(1, STEREO);}else{//ROS_WARN("disable IMU!");estimator.changeSensorType(0, STEREO);}return;
}// 切换相机模式(单目/双目)
void cam_switch_callback(const std_msgs::BoolConstPtr &switch_msg)
{if (switch_msg->data == true){//ROS_WARN("use stereo!");estimator.changeSensorType(USE_IMU, 1);}else{//ROS_WARN("use mono camera (left)!");estimator.changeSensorType(USE_IMU, 0);}return;
}int main(int argc, char **argv)
{ // 初始化 ROS 节点名为 "vins_estimator";
// 使用私有命名空间 NodeHandle(~),用于加载配置参数等。ros::init(argc, argv, "vins_estimator");ros::NodeHandle n("~");// 设置日志级别为 Inforos::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Info);if(argc != 2){printf("please intput: rosrun vins vins_node [config file] \n""for example: rosrun vins vins_node ""~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml \n");return 1;}// 将配置文件路径传入 readParameters(),读取 YAML 中的传感器参数、话题名等。string config_file = argv[1];printf("config_file: %s\n", argv[1]);readParameters(config_file);// 将 readParameters 中加载好的配置传入 Estimator 类,设置内部的滑窗大小、预积分结构、相机参数等。estimator.setParameter();#ifdef EIGEN_DONT_PARALLELIZEROS_DEBUG("EIGEN_DONT_PARALLELIZE");
#endifROS_WARN("waiting for image and imu...");// 调用 registerPub(n) 注册轨迹发布器(如 /vins/odometry, /vins/path, /vins/pose_graph)。registerPub(n);ros::Subscriber sub_imu;if(USE_IMU){sub_imu = n.subscribe(IMU_TOPIC, 2000, imu_callback, ros::TransportHints().tcpNoDelay());}// 订阅前端特征跟踪器的输出,类型是 sensor_msgs/PointCloudros::Subscriber sub_feature = n.subscribe("/feature_tracker/feature", 2000, feature_callback);// 图像左目(或单目)的订阅。ros::Subscriber sub_img0 = n.subscribe(IMAGE0_TOPIC, 100, img0_callback);ros::Subscriber sub_img1;// 若为双目配置,再订阅右目图像。if(STEREO){sub_img1 = n.subscribe(IMAGE1_TOPIC, 100, img1_callback);}// 支持运行时通过布尔话题控制系统行为(重启、切换 IMU、切换相机模式)ros::Subscriber sub_restart = n.subscribe("/vins_restart", 100, restart_callback);ros::Subscriber sub_imu_switch = n.subscribe("/vins_imu_switch", 100, imu_switch_callback);ros::Subscriber sub_cam_switch = n.subscribe("/vins_cam_switch", 100, cam_switch_callback);// 启动图像同步处理线程,新开一个线程执行 sync_process():
// 从图像队列同步图像帧
// 送入 estimator.inputImage(...)
// 与 ROS 回调线程并行执行std::thread sync_thread{sync_process};// ROS 阻塞式事件循环:
// 负责触发所有话题回调(如 imu_callback, feature_callback 等)
// 一直运行直到节点关闭ros::spin();return 0;
}
opencv常见编码格式
| 编码类型 | 含义 |
|---|---|
MONO8 | 单通道灰度图,每像素 8 位 |
BGR8 | 彩色图(OpenCV 默认顺序) |
RGB8 | 彩色图(红绿蓝顺序) |
MONO16 | 16 位灰度图(如深度图) |
TYPE_32FC1 | 浮点型图(OpenCV 32位浮点) |
代码解析
┌──────────────────────┐│ ros::spin() │ ← IMU / 图像 / 特征 回调线程└──────┬───────────────┘│
┌────────────▼────────────┐
│ callback 函数 │
│imu_callback/img_callback│
└────────────┬────────────┘│ push msg
┌────────────▼────────────┐
│ 消息缓冲区 │ ← 带锁访问
└────────────┬────────────┘│┌───────▼────────┐│ sync_process() │ ← 独立线程└───────┬────────┘│┌───────▼────────┐│ estimator │└────────────────┘
void feature_callback(const sensor_msgs::PointCloudConstPtr &feature_msg)
-
是 ROS 中订阅 sensor_msgs::PointCloud 话题的回调函数。
-
feature_msg 存储了一个特征点集合(一帧图像中的多个点),每个点带有:
-
点 ID、相机 ID
-
图像坐标 (u, v)
-
归一化坐标 (x, y, z),其中 z == 1 是归一化保证
-
像素速度(光流) (vx, vy)
-
(可选)特征点真值坐标 gx, gy, gz
-
| 数据来源 | 存放位置 |
|---|---|
| 特征点 ID | channels[0].values[i] |
| 相机 ID | channels[1].values[i] |
| 像素归一化坐标 (x, y, z=1) | points[i].x/y/z |
| 像素坐标 (u, v) | channels[2/3].values[i] |
| 像素速度 (vx, vy) | channels[4/5].values[i] |
| (可选)GT 坐标 | channels[6/7/8].values[i] |
| 模块 | 功能 |
|---|---|
feature_msg | 包含每个特征点的归一化坐标、像素坐标、ID、相机ID、速度等 |
featureFrame | 按照 feature_id 组织的观测结构(可支持多相机) |
inputFeature() | 将所有特征数据传入后端优化器 |
pts_gt | 存储特征点真值(仿真/评估用) |