BeckHoff_FB --> F_SEQ_X2_Robot 函数
这个函数是工业自动化系统中用于控制ABB机器人执行特定任务,主要负责参数配置和任务状态监测。

目录
一、函数实例化
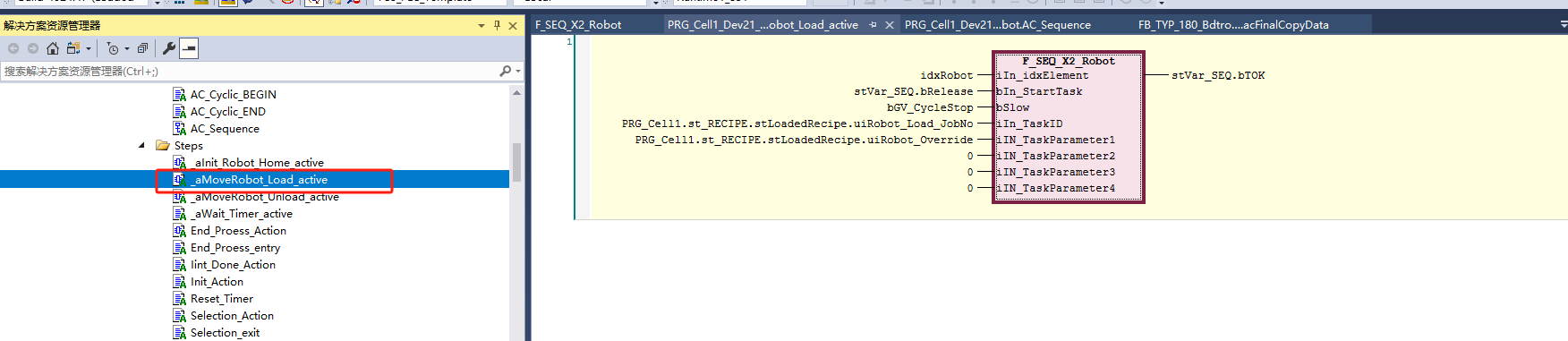
一、的FBD编程环境中的调用
二、函数变量声明
三、函数源代码
四、函数代码分析
4.1功能概述
4.2 代码拆解与逻辑分析
1. 初始化与返回值清除
2. 输入参数校验
3. 任务参数配置
4. 任务参数传递
5. 任务状态反馈
4.3 应用场景与设计模式
4.4 潜在问题与优化建议
4.5总结
一、函数实例化
一、的FBD编程环境中的调用
二、函数变量声明
FUNCTION F_SEQ_X2_Robot: BOOL(*---------------------------------------------*)
(*IN variables*)
(*---------------------------------------------*)
VAR_INPUTiIn_idxElement :INT; (* Elementnumner *)bIn_StartTask :BOOL; (* Request Element move to WP (Workposition) *)bSlow :BOOL; (* Request Element move to WP (Workposition) Slow *) iIn_TaskID :INT :=0; (* Task ID to be started *)iIN_TaskParameter1 :INT :=0; (* Additional Taskparameter eg. Point ID / Sub_taks /Palet Number*)iIN_TaskParameter2 :INT :=0; (* Additional Taskparameter eg. Point ID / Sub_taks /Palet Number*)iIN_TaskParameter3 :INT :=0; (* Additional Taskparameter eg. Point ID / Sub_taks /Palet Number*)iIN_TaskParameter4 :INT :=0; (* Additional Taskparameter eg. Point ID / Sub_taks /Palet Number*)END_VAR(*---------------------------------------------*)
(*IN/OUT variables*)
(*---------------------------------------------*)(*---------------------------------------------*)
(*Local Constants*)
(*---------------------------------------------*)
VAR CONSTANT
END_VAR(*---------------------------------------------*)
(*Local variables*)
(*---------------------------------------------*)
VAR
END_VAR(*---------------------------------------------*)
(*Lokal temp variables*)
(*---------------------------------------------*)
VAR
END_VAR(*All VAR_IN_OUT variables have been moved to the end of the declaration due to compatibility reasons*)
VAR_IN_OUT
END_VAR三、函数源代码
(*clear function's return value*)
F_SEQ_X2_Robot := FALSE;(*check index valid and not both inputs true*)
IF (iIn_idxElement <= 0)OR (iIn_idxElement > iGC_ELEMENTE_End)OR (iIn_TaskID =0)
THENRETURN;
END_IF;(*Set command in element structure *)
stGV_SYS_EL