UR 协作机器人「三剑客」:精密轻量担当(UR7e)、全能协作主力(UR12e)、重型任务专家(UR15)
UR协作机器人正以其卓越性能在现代制造业自动化中扮演重要角色。UR7e、UR12e和UR15通过创新技术和精准设计满足了不同行业的多样化需求。其中,UR15以其速度、精度及人工智能准备能力成为自动化领域的重要突破。UR7e和UR12e则在负载规格和市场定位上不断优化,展现了技术创新的强大潜力。这些改进充分体现了Universal Robots在推动工业自动化发展中的领导地位。

UR协作机器人的核心特点
UR7e的有效载荷与精度
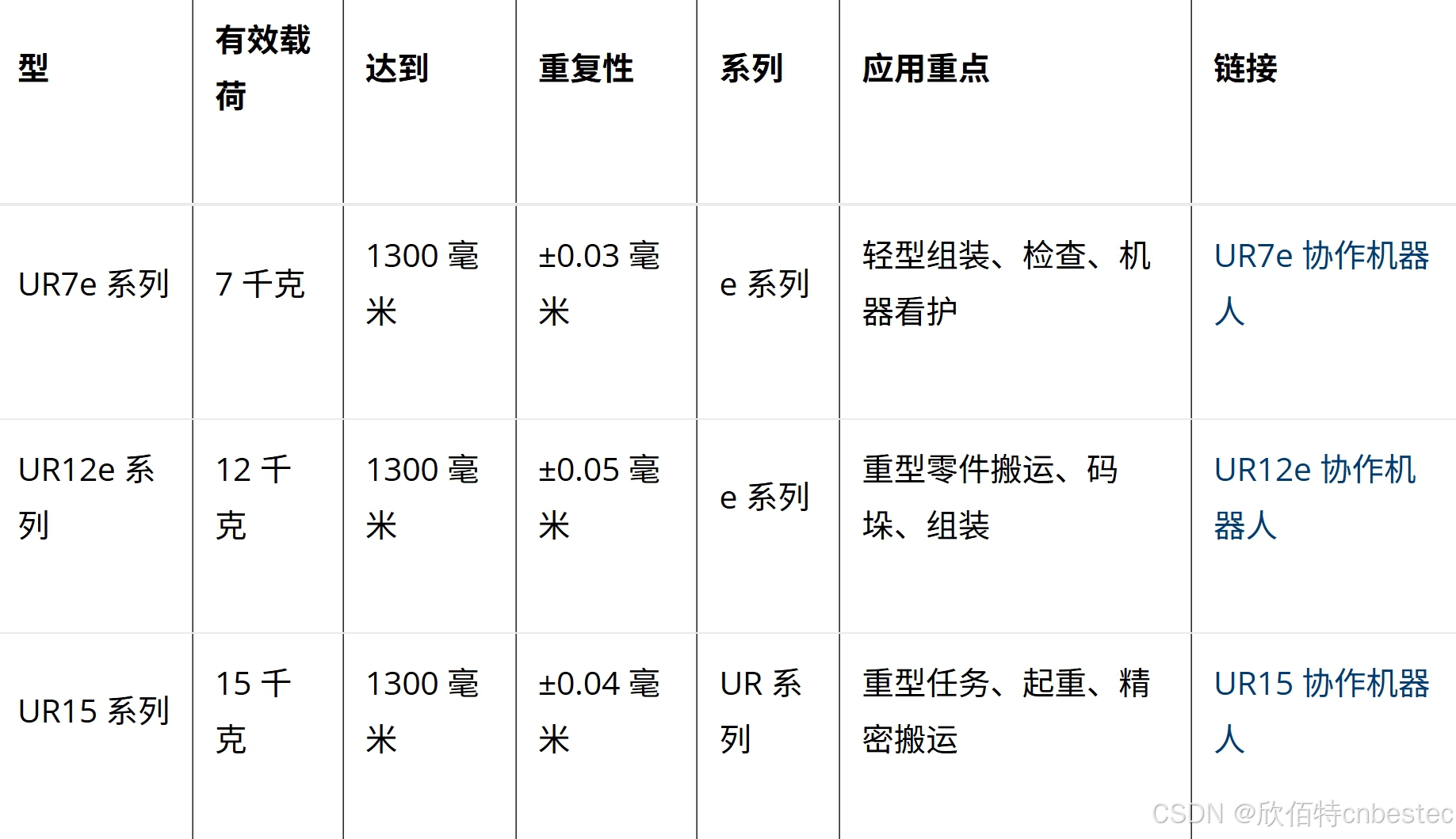
UR7e以其卓越的性能在协作机器人市场中占据重要地位。它的有效载荷为7.5kg,工作范围达到850mm,适合轻型装配、机器看护和检查等任务。UR7e的设计兼顾了紧凑性和高精度,重复精度可达±0.03mm,确保了复杂任务的可靠性。

UR7e还具备以下核心特点:
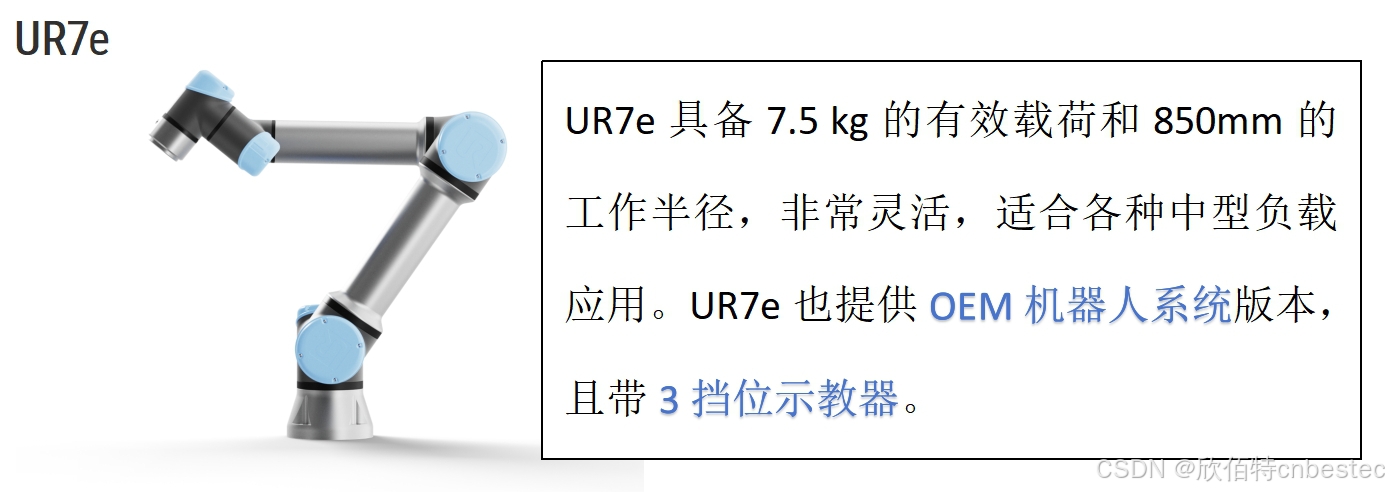
力控响应速度:0.1N级别的力控响应,能够敏锐感知外部接触力,保障操作安全。
轻量化设计:自重小于50kg,适应狭小工作空间,提升灵活性。
拖拽示教功能:操作人员可手动拖动机械臂,机器人自动记录动作轨迹,降低编程难度。
这些特点使UR7e成为高精度和灵活性需求场景的理想选择,尤其在电子制造和医疗行业中表现出色。
UR12e协作机器人的性能与灵活性
UR12e以其强大的性能和灵活性满足了更高负载的工业需求。它支持12kg的有效载荷,臂展为1300mm,重复精度为±0.05mm,适合搬运、码垛和高级装配等任务。尽管负载能力更高,UR12e依然保持了紧凑的设计和协作功能,适应复杂的工作环境。

以下是UR12e协作机器人的性能亮点:
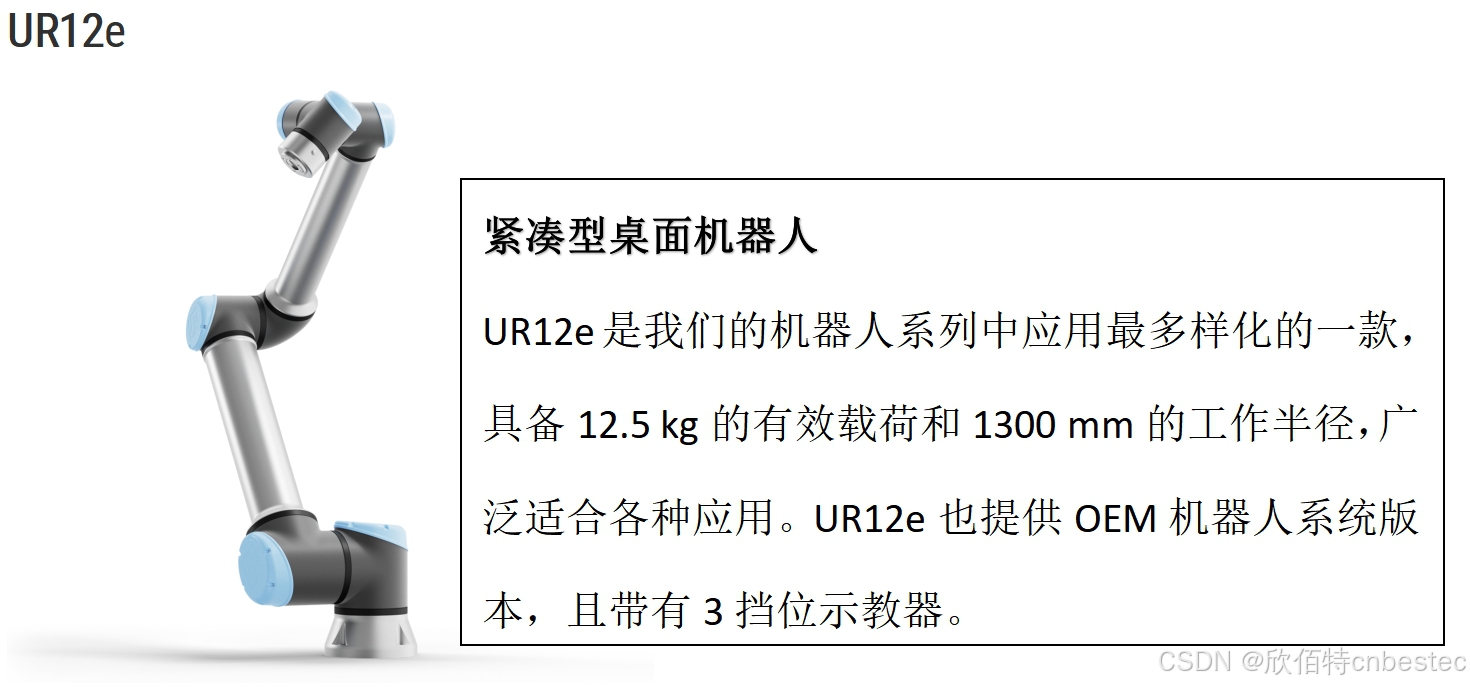
最大速度:每秒5米,显著提升生产效率。
周期时间缩短:高达30%,优化了生产节奏。
设计特点:轻巧设计,小巧占地,适合复杂工作空间。
UR12e的灵活性和高性能使其在金属加工和汽车行业中广泛应用,尤其在焊接和搬运任务中表现卓越。
UR15的高效能与重载能力
UR15作为Universal Robots的旗舰产品,专为重型任务设计。它的有效载荷为15kg,臂展同样为1300mm,重复精度达到±0.04mm,适合高强度和高精度的工业应用。UR15弥合了e系列与大型工业机器人之间的差距,为用户提供了更高的负载能力,同时保持了UR协作机器人一贯的安全性和灵活性。
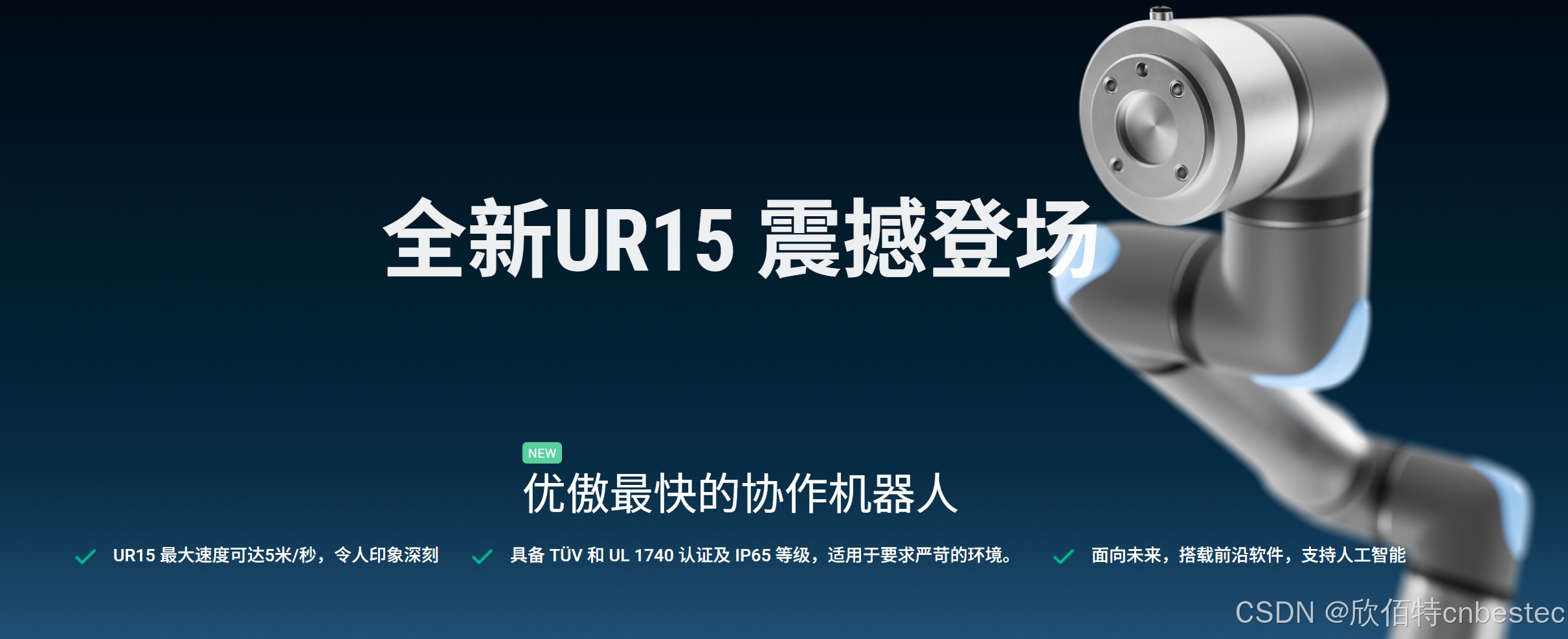

UR15的核心优势包括:
见证革新!UR15高速协作机器人以 5 米 / 秒速度、OptiMove 技术、PolyScope X+AI 平台重塑协作边界
AI加速器:使机器人从“工具”进化为“伙伴”,应对高混杂、低批量的生产需求。
即插即用:支持快速部署和灵活扩展,减少停机时间。
软硬件协作:硬件、软件、传感器和接口的无缝整合,加速应用落地。
凭借这些特点,UR15在汽车制造和重工业领域中展现了强大的竞争力,尤其在装配和检测任务中表现突出。
UR协作机器人广泛应用于多个行业。在汽车行业,用于装配、检测和螺钉拧紧,提升效率与精度;金属加工中,胜任焊接与搬运任务,增强安全性与灵活性;电子制造领域,实现芯片、电池等精密组装与检测,响应高效高质需求;医疗与制药行业,完成试剂分装、样本处理及设备组装,保障操作安全与洁净环境适应性。凭借高精度、灵活性与成本优势,UR协作机器人正推动各行业自动化升级。UR12e和UR15以其精准设计和技术创新,为不同行业提供了可靠的自动化解决方案。

1. 什么是协作机器人?
协作机器人是一种能够与人类安全协作的工业机器人。它们通常设计紧凑,具备力控功能和高精度,适用于多种行业的自动化任务。
2. UR协作机器人如何确保操作安全?
UR协作机器人通过内置的力控传感器感知外部接触力。当检测到异常力时,机器人会立即停止运行,避免对操作人员造成伤害。
3. UR7e、UR12e和UR15的主要区别是什么?
UR7e适合轻型任务,负载为7kg;UR12e支持更高负载,达12kg;UR15则专为重型任务设计,负载能力为15kg。三者的臂展均为1300mm,但精度和应用场景有所不同。
4. UR协作机器人是否需要专业编程技能?
不需要。UR协作机器人支持拖拽示教功能,用户可以通过手动拖动机械臂完成编程。这种设计降低了使用门槛,适合没有编程经验的操作人员。
5. UR协作机器人适合哪些行业?
UR协作机器人广泛应用于汽车制造、金属加工、电子制造和医疗制药等行业。它们在装配、检测、焊接和搬运等任务中表现出色,满足了多样化的工业需求。