STM32开发过程中碰到的问题总结 - 4
文章目录
- 前言
- 1、编译时的IRAM1和IRAM2 分别是什么意思啊
- 2、多线程时使用Printf进行打印,为什么有些日志会被吞掉呢?
- 3. 程序下载不进去,提示Contents mismatch at: 08006B3CH
- 4. 裸机开发中因栈空间不足导致的反复重启问题
- STM32裸机开发如何调整栈深度
- 栈大小的选择依据
- 解决办法
- 裸机开发和基于FreeRTOS的开发栈调整的方式差异
- 5. 下载时提示 下载到flash出错(Selected Data (0x8000 - 0xc543) does not fit ..)
前言
记录下在使用STM32L4系列芯片进行开发时,碰到的各种问题,第4期。
比较杂。
1、编译时的IRAM1和IRAM2 分别是什么意思啊
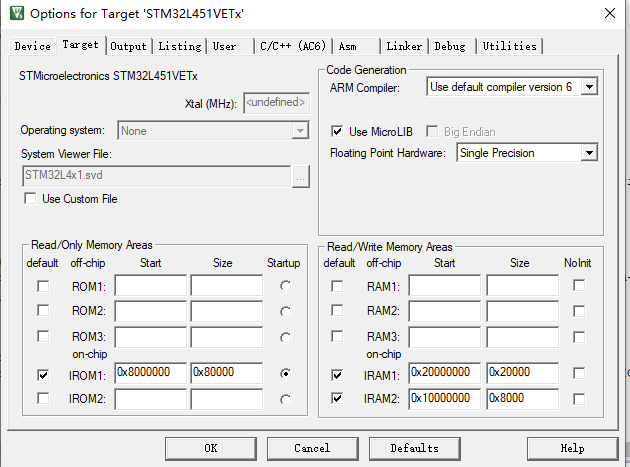
在Keil5编译环境中,IRAM1和IRAM2分别指代嵌入式芯片内部不同物理地址段的片内随机存取存储器(On-Chip RAM),其核心区别在于内存空间的分配逻辑和应用场景
基础定义与芯片关联性
-
IRAM的物理本质
IRAM(Internal RAM)是芯片制造商在MCU内部集成的RAM存储单元,其地址范围由芯片的Memory Map决定。例如:
• STM32F407的IRAM1地址为0x20000000(128KB),IRAM2为0x10000000(64KB)• CW32L010F8的IRAM1地址为
0x20000000(4KB),无IRAM2 -
Keil中的配置逻辑
Keil通过工程设置中的Target -> Read/Write Memory Areas定义IRAM的地址和大小,但该界面仅支持两段RAM设置。对于多RAM区间的芯片(如STM32H7B0),需通过分散加载文件(.sct)完整描述所有物理RAM段。
二、IRAM1与IRAM2的功能差异
| 维度 | IRAM1 | IRAM2 |
|---|---|---|
| 默认用途 | 存放全局变量、栈(Stack)和堆(Heap) | 扩展用途(如DMA缓冲区、RTOS任务栈) |
| 启动代码初始化 | 由startup_xxx.s中的初始化代码清零 | 需手动管理或通过分散加载文件指定初始化 |
| 访问速度 | 通常与CPU同频,延迟更低 | 可能位于低速总线(如AHB2),延迟略高 |
| 典型配置 | 主程序运行的核心RAM区 | 可选配置,部分芯片无此区域 |
2、多线程时使用Printf进行打印,为什么有些日志会被吞掉呢?
printf函数打印的工作原理
printf是C标准库函数,其内部实现依赖于底层字符输出函数fputc。每次调用printf时,它会遍历格式化字符串,逐个字符调用fputc进行输出。
// 用户自定义的fputc实现(以串口为例)
int fputc(int ch, FILE *f) {HAL_UART_Transmit(&huart1, (uint8_t*)&ch, 1, 1000); // 发送到串口1return ch;
}
- 关键代码路径:printf() → vfprintf() → __fputc() → 用户重写的fputc
怀疑点
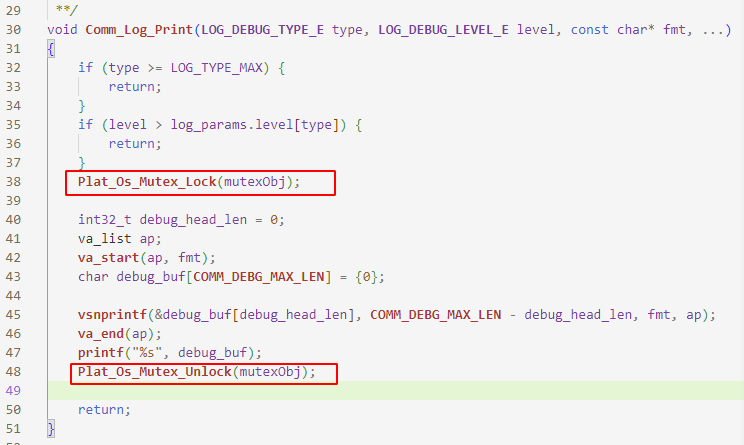
STM32中的HAL_UART_Transmit函数的调用本身不是线程安全的,当多个线程同时调用它时,会导致对统一硬件资源(UART)的竞争,进而覆盖数据,因此,需要互斥锁或者队列保证同一时间只有一个线程访问UART。
写代码测试
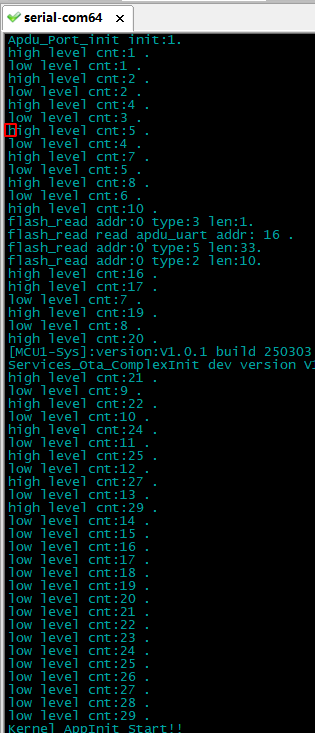
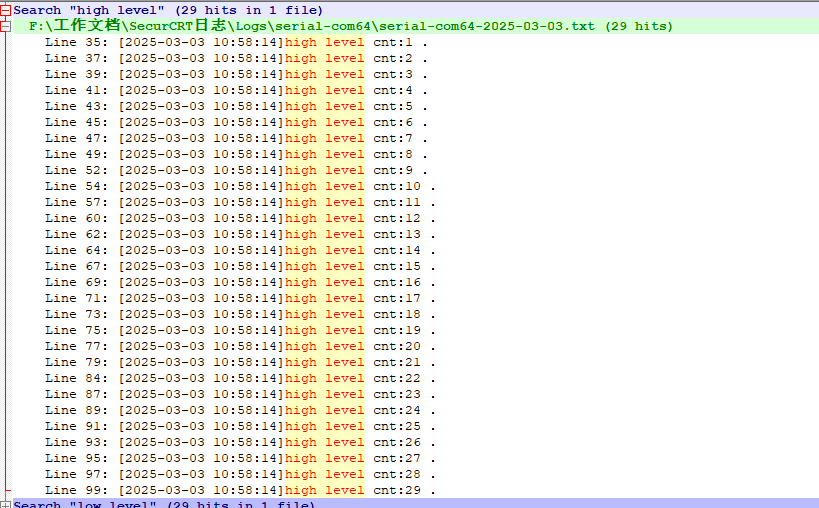
我们写两个线程进行打印的功能,1个高优先级的线程,1个低优先级的线程,让两个线程不停的打印信息,查看现象
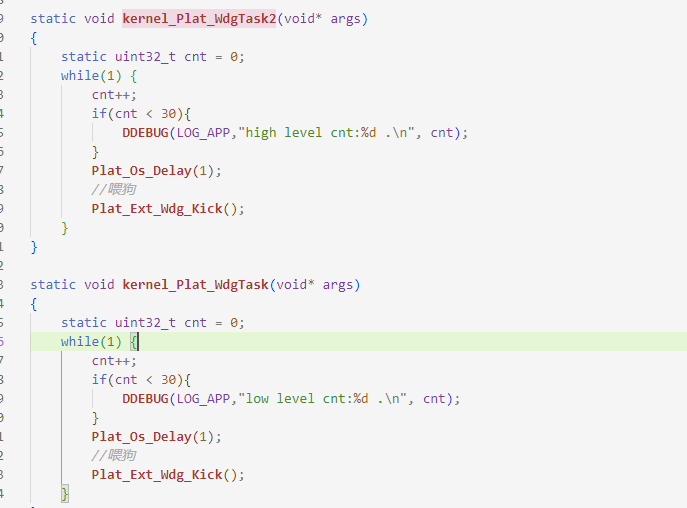
查看下方的测试结果能够看到,高优先级任务打印的内容反而丢的更多,所以也怀疑是printf函数调用结束之后
改善办法
可以通过在printf函数之前加上互斥锁,进行有效的解决
我们写两个线程,1个高优先级的线程,1个低优先级的线程,让两个线程不停的打印信息,查看现象
查看现象问题得到有效的解决。
3. 程序下载不进去,提示Contents mismatch at: 08006B3CH
问题现象
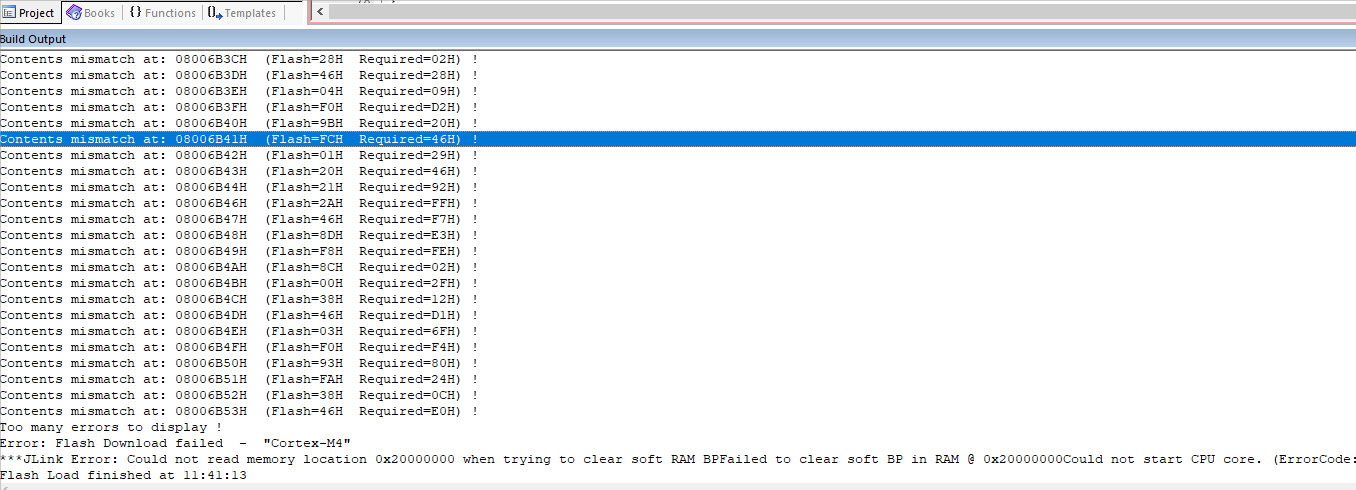
问题原因

4. 裸机开发中因栈空间不足导致的反复重启问题
问题描述
在将一个比较大的公共组件移植到非操作系统的设备上时,发现一运行就动不动崩溃,关键是看代码逻辑也看不出来什么问题。
然后排查了一些时间,发现是栈空间不足导致的,之前在基于FreeRTOS的开发中也经常碰到这个问题,这里就简单说一下
STM32裸机开发如何调整栈深度
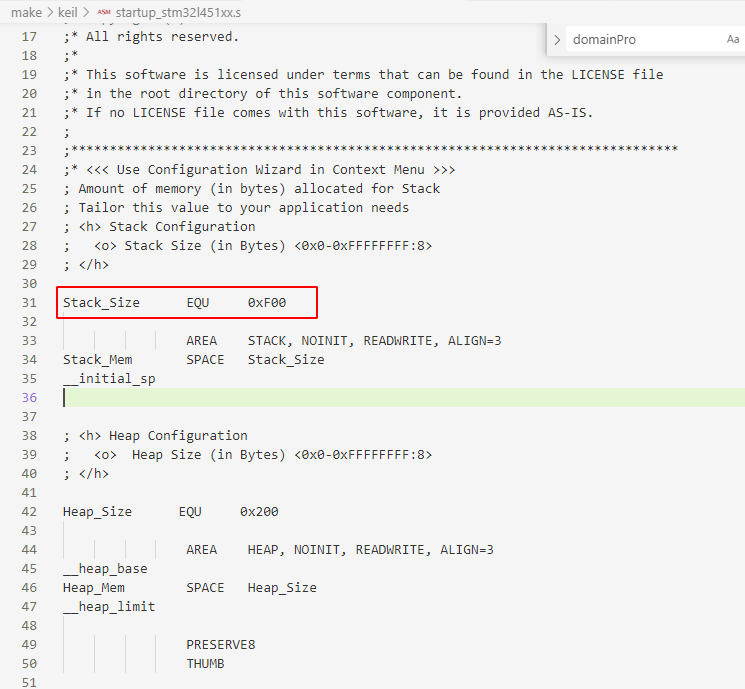
通常,栈的大小在启动文件(startup_stm32xxxxx.s)中定义,用Stack_Size这个EQU来设置。不同的STM32系列可能有不同的默认值,比如F1可能默认是0x400(1KB),而F4可能更大,比如0x800(2KB)。但具体数值需要根据具体的启动文件来确定,不同的编译环境(如Keil、IAR、STM32CubeIDE)也可能有不同的默认设置
如何确定合适的栈大小。这时候需要考虑应用中的函数调用深度、中断嵌套层数以及局部变量的大小。如果函数递归调用层次深,或者中断频繁且嵌套多,局部变量占用空间大,就需要更大的栈空间。相反,简单的应用可能不需要太大的栈。
Keil的map文件可以查看函数的调用深度和局部变量的大小;而调试时,可以通过填充栈内存并检查最大使用量来确定实际需求。
栈大小的选择依据
RAM中数据的分布
High Address →
┌───────────────┐
│ Stack │ ← 栈顶(向下生长)
├───────────────┤
│ Heap │ ← 堆(向上生长)
├───────────────┤
│ .bss │ ← 未初始化全局变量
├───────────────┤
│ .data │ ← 已初始化全局变量
└───────────────┘
Low Address →
栈中存放哪些信息
存放局部变量、函数调用时的返回地址、函数参数、中断上下文(寄存器保存)等。
解决办法
所以我们可以根据当前使用芯片的RAM大小和程序中使用栈的情况基本能够有个预估。
比如我这里用的芯片RAM有100K,我明知道我全局变量啥的用的很少,但是我局部变量用的很多,所以我把栈的大小从1K调整到了4K。
裸机开发和基于FreeRTOS的开发栈调整的方式差异
裸机
裸机开发时,我们所有的消耗都是消耗的主栈(MSP)的。
使用FreeRTOS
使用了RTOS时,每个任务会有自己的栈空间,这时候主栈(MSP)的大小可能不需要太大,因为在线程模式下,任务栈由PSP管理,而主栈主要负责处理异常信息和中断,所以主栈的压力会小很多
5. 下载时提示 下载到flash出错(Selected Data (0x8000 - 0xc543) does not fit …)
问题现象
程序编译好后,使用Jflash和Keil5进行下载都提示下载失败,按照网上的教程重新擦除后再下载也不行。
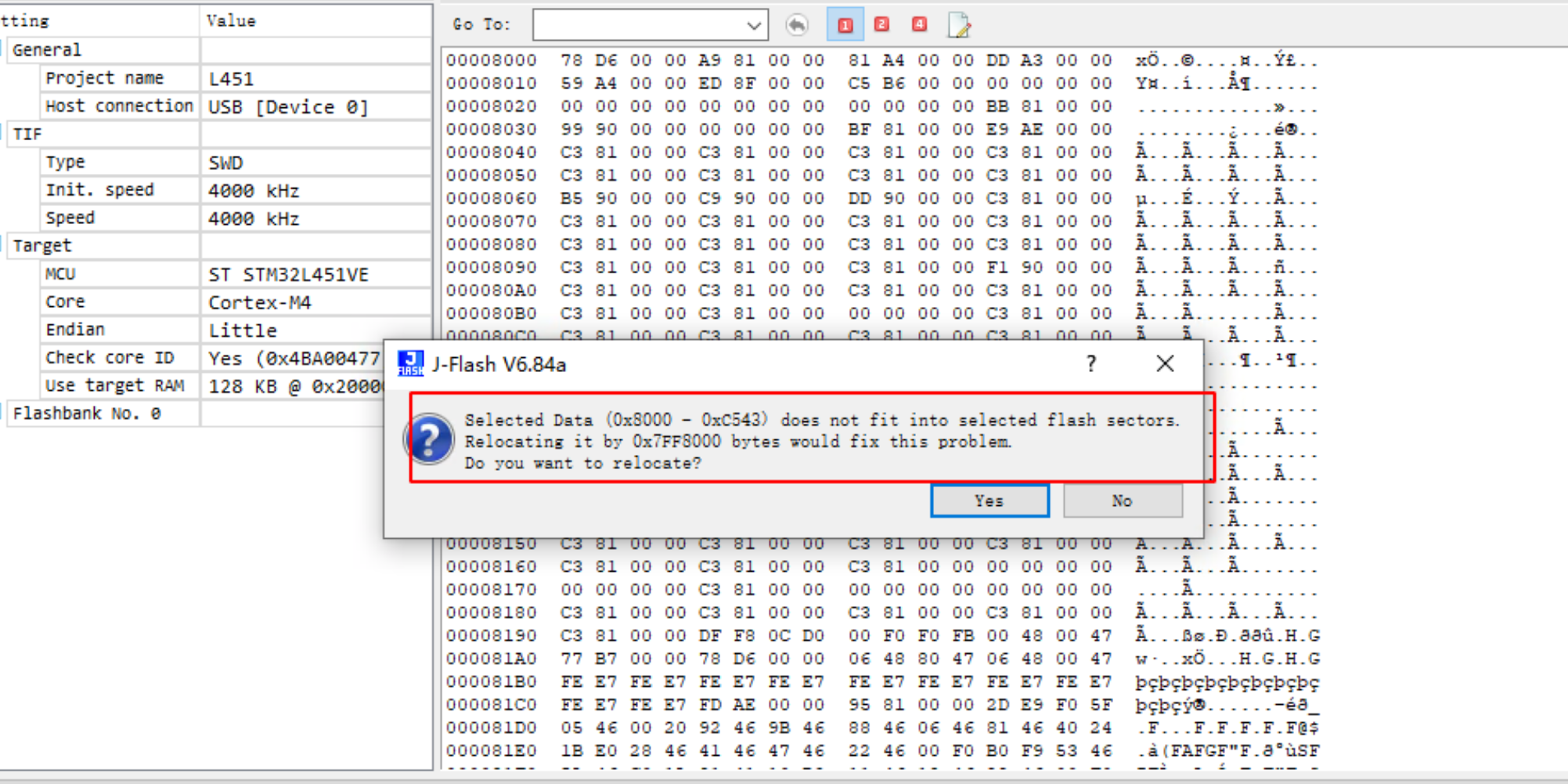
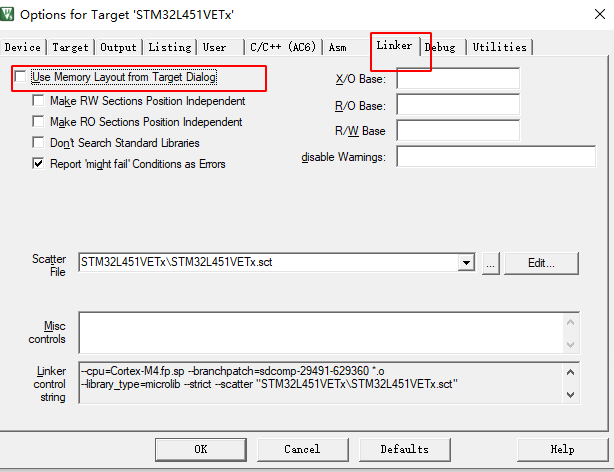
解决办法
发现我程序写入到Flash的起始地址是0x00008000,正常情况下应该是0x0800 0000。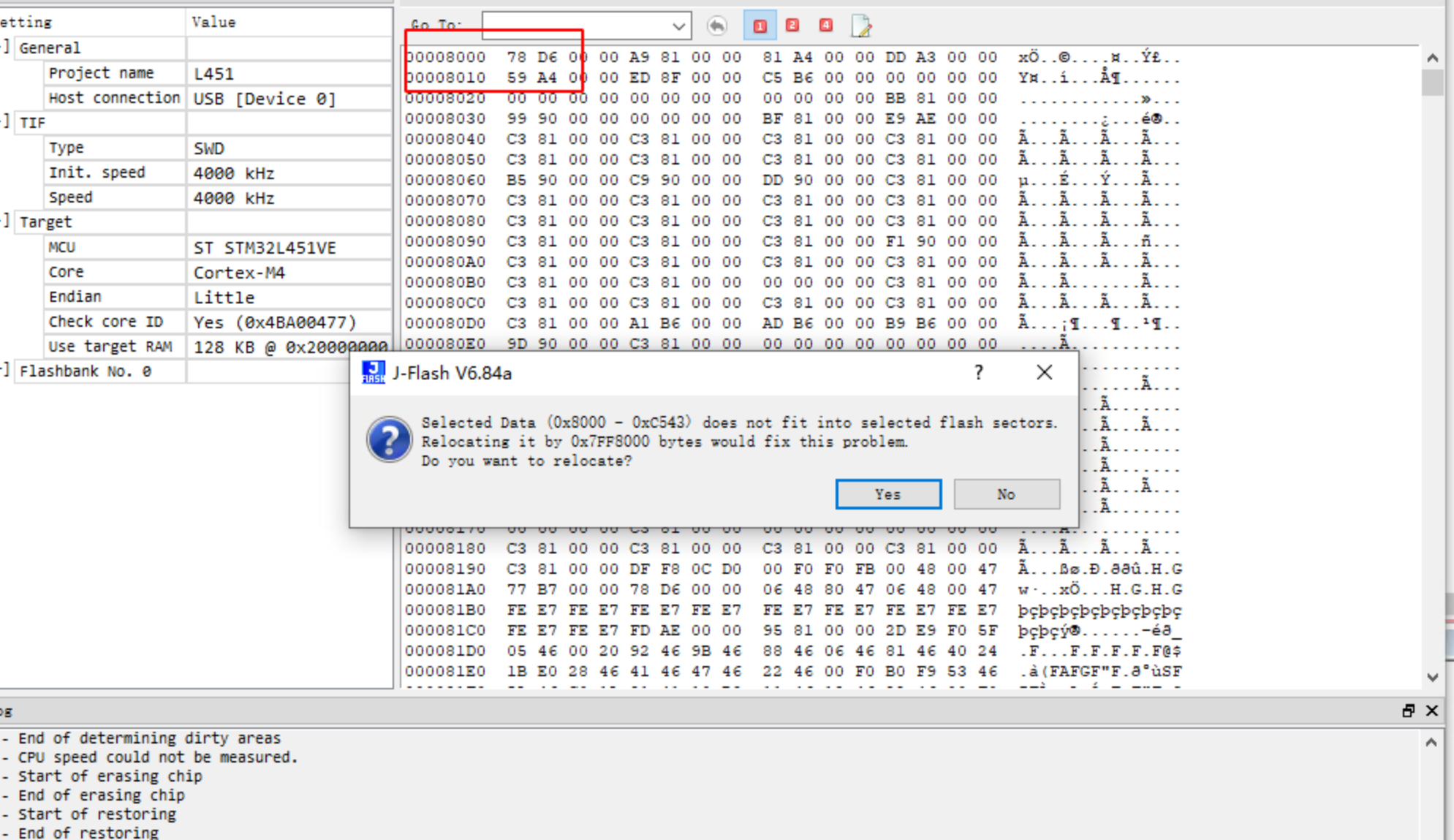
然后意识到是自己的一些配置项配错了(Use Memory Layout from Target Dialog)没有配置,因为之前我们都是使用的自己写的程序链接脚本,然后现在更换成了Keil5上界面配置的后,没注意到要勾选这里。