pcl案例2 叶片与根茎的分离step2
1,半径滤波,打散茎与叶片
2,聚簇按距离分离
3,按x轴外包围abb的最大值选出茎
4,旋转obb进行cropbox分离整个茎体
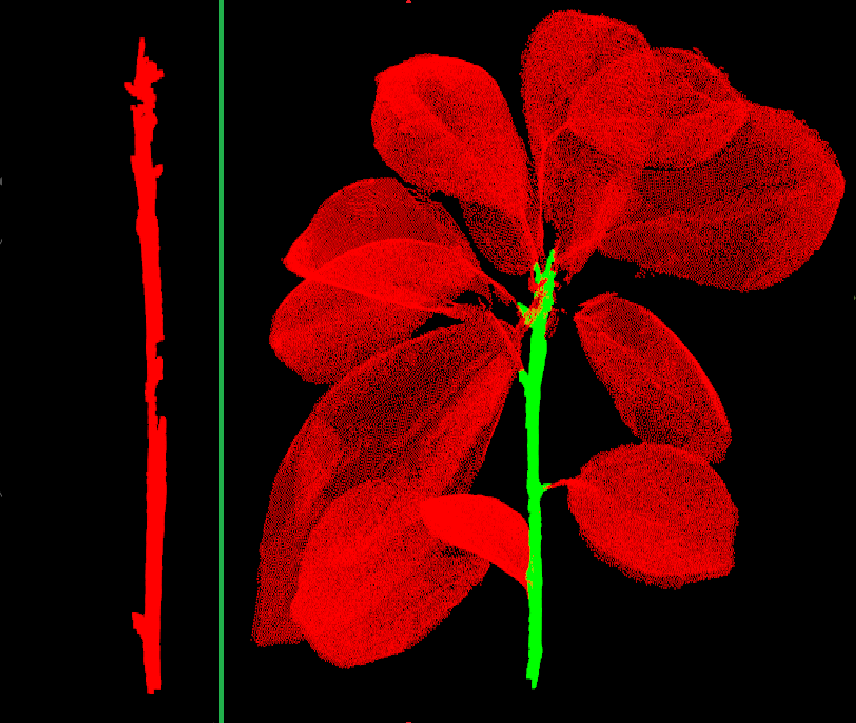
效果是这样的
//step2 begin//半径滤波pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_rem = radius_remove_filter < pcl::PointXYZ >(cloud_trans1, 0.002, 75);show_pointcloud<pcl::PointXYZ>(cloud_rem, 1, 0);//距离聚簇,在halcon3d里是connection_object_model_3d 别人封装好的就是好使vector < pcl::PointCloud <pcl::PointXYZ>::Ptr> cloud_ptr_vector = connection_cloud<pcl::PointXYZ>(cloud_rem, 0.001, 1000, 9999999);cout << cloud_ptr_vector.size() << endl;//根据特征 x方向的高度,选择出出茎部的位置float a = 0;int index = 0;//pcl::PointXYZ p_min, p_max;for (int i=0;i<cloud_ptr_vector.size();i++){//show_pointcloud<pcl::PointXYZ>(cloud_ptr_vector[i], 1, 0);pcl::getMinMax3D(*cloud_ptr_vector[i], p_min, p_max);if (p_max.x -p_min.x >a){a = p_max.x - p_min.x;index = i;}}//show_pointcloud < pcl::PointXYZ >(cloud_ptr_vector[index], 4, 0);//下采样,计算obb包围盒pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_down1 = down_sample<pcl::PointXYZ>(cloud_ptr_vector[index], 0.5);//show_pointcloud < pcl::PointXYZ >(cloud_down1, 4, 0);pcl::PointXYZ center;Eigen::Affine3f trans_matrix2 = get_trans_obb<pcl::PointXYZ>(cloud_down1, p_min, p_max, center);p_min.x = p_min.x - 0.2;p_min.y = p_min.y *1.2;p_min.z = p_min.z *1.2 ;p_max.x = p_max.x + 0.2;p_max.y = p_max.y * 1.2;p_max.z = p_max.z * 1.2;pcl::PointCloud<pcl::PointXYZ>::Ptr plant_stem(new pcl::PointCloud<pcl::PointXYZ>);pcl::CropBox<pcl::PointXYZ> crop_box;//crop_box.setInputCloud(cloud_trans1);crop_box.setInputCloud(cloud_trans1);crop_box.setMin(p_min.getArray4fMap());crop_box.setMax(p_max.getArray4fMap());crop_box.setTransform(trans_matrix2); //这里输入的矩阵就是将点云转正的矩阵。也可以理解为在crop时,是将点云以0bb矩阵转到00点后根军p_min和p_max进行裁剪的。crop_box.filter(*plant_stem);cout << plant_stem->points.size() << endl;show_pointcloud<pcl::PointXYZ>(plant_stem, 3, 0);//setp2 end