【MATLAB例程】水下AUV自主导航定位例程,定位使用TDOA(到达时间差),适用于三维环境,附代码下载链接
代码实现基于到达时间差(TDOA)的水下AUV(自动水下航行器)导航仿真系统,旨在通过模拟AUV在三维水下环境中的运动,利用水声信标来估算AUV的位置。仿真系统包括四个声学信标,并通过TDOA定位技术迭代求解AUV的实时位置。
文章目录
- 程序简介
- 核心功能
- 代码流程
- 运行结果
- MATLAB源代码
程序简介
代码实现了基于到达时间差(TDOA)的水下AUV(自动水下航行器)导航仿真系统,旨在通过模拟AUV在三维水下环境中的运动,利用水声信标来估算AUV的位置。仿真系统包括四个声学信标,并通过TDOA定位技术迭代求解AUV的实时位置。
核心功能
- 水声TDOA定位:通过测量AUV与多个声学信标之间的到达时间差,使用简化的TDOA定位算法来估算AUV的位置。
- 仿真控制:根据估算的位置计算AUV的运动方向,并控制其以合适的速度向目标点前进,直到到达目标。
- 误差统计与结果展示:记录每一步的定位误差,绘制AUV的真实轨迹与估计轨迹的三维图,同时展示定位误差随时间的变化。
代码流程
-
参数设置:
- 设置水声传播速度、测量噪声标准差等仿真参数。
- 配置四个声学信标的三维坐标。
- 配置AUV的初始位置、目标位置、最大速度和仿真步长等。
-
初始化:
- 初始化AUV的当前位置、轨迹记录、误差数组等。
-
仿真循环:
- TDOA测量:计算AUV与四个声学信标的距离,并转换为到达时间,加入噪声。
- 位置估计:使用简化的TDOA定位算法,根据TDOA值估算AUV的位置。
- 导航控制:根据估算位置与目标位置的差异,计算并更新AUV的运动速度和方向,逐步推进AUV到达目标位置。
- 误差记录:记录每一步的真实位置与估算位置之间的误差,并输出每一步的仿真信息。
-
结果展示:
- 绘制AUV的真实轨迹与估算轨迹。
- 绘制AUV定位误差的变化图。
-
统计结果:
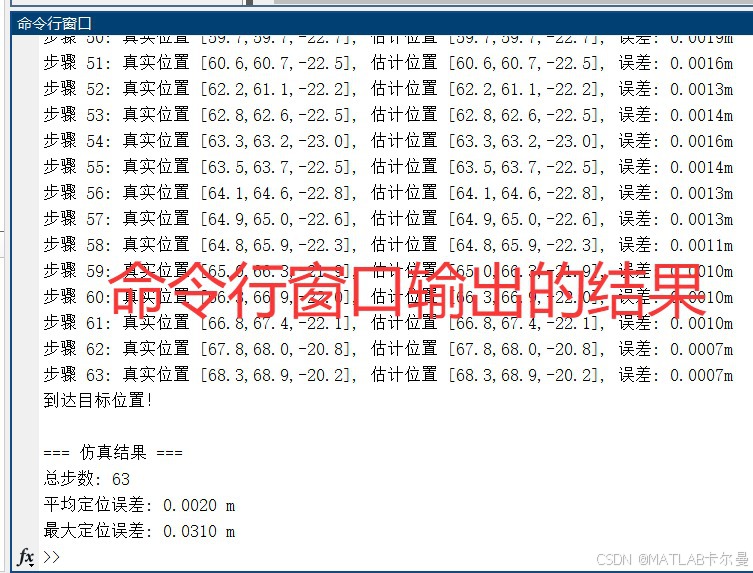
- 输出仿真结束后的统计信息,包括总步数、平均定位误差、最大定位误差等。
详见定位结果输出的示例
- 输出仿真结束后的统计信息,包括总步数、平均定位误差、最大定位误差等。
运行结果
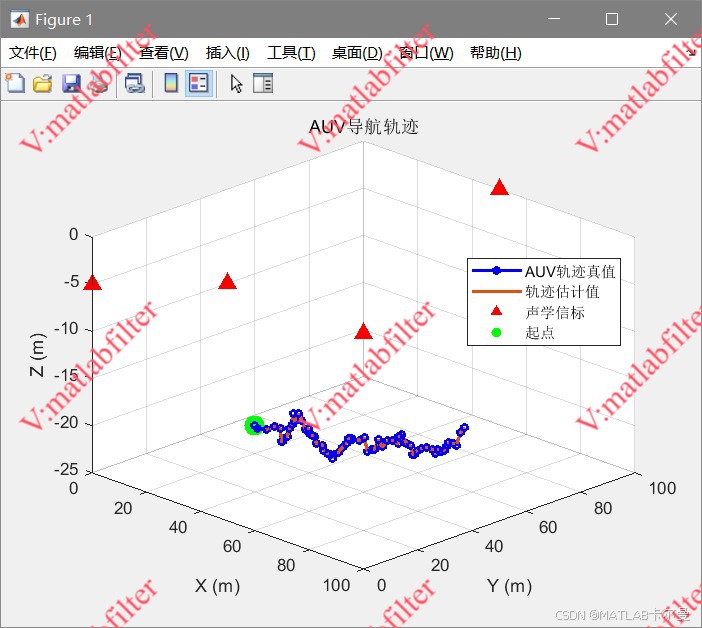
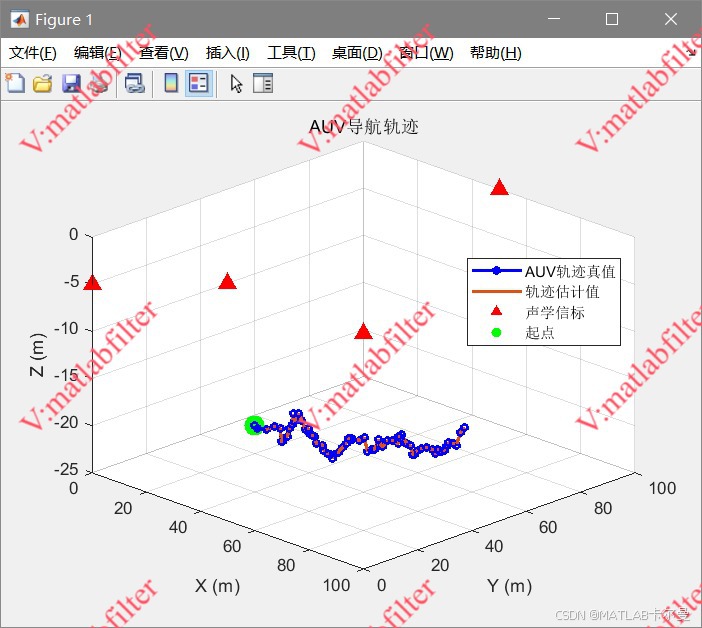
导航轨迹(含真值与估计值轨迹的对比):
定位误差变化曲线:
命令行输出的定位结果:
MATLAB源代码
以下代码,粘贴到MATLAB空脚本中即可直接运行:
%% AUV水声TDOA导航系统
% 基于到达时间差(TDOA)的AUV导航仿真,三维空间、 四个锚点的水下背景,两部迭代求TDOA
% author:
% 2025-08-03/Ver1
clear;clc;close all;
rng(0);%% 1. 参数设置
sound_speed = 1500; % 声速 (m/s)
noise_std = 1e-9; % 测量噪声标准差 (s) - 修正:改为合理值% 4个声学信标位置 [x, y, z] - 修正:调整为更合理的几何配置
beacons = [0, 0, -5; % 信标1100, 0, 0; % 信标2 50, 100, 0; % 信标30, 50, -10 % 信标4
];% AUV参数
start_pos = [30, 30, -20]; % 起始位置
target_pos = [70, 70, -20]; % 目标位置
max_speed = 1; % 最大速度 (m/s)
dt = 1; % 时间步长 (s)
max_steps = 100; % 最大步数%% 2. 初始化
auv_pos = start_pos; % 当前位置
trajectory = zeros(max_steps, 3); % 轨迹记录
traj_est = zeros(max_steps, 3); % 轨迹记录
errors = zeros(max_steps, 1); % 定位误差%% 3. 主仿真循环
fprintf('开始AUV导航仿真...\n');for step = 1:max_steps%% 3.1 TDOA测量% 计算各信标到AUV的距离和时间distances = zeros(4, 1);times = zeros(4, 1);for i = 1:4distances(i) = norm(auv_pos - beacons(i, :));times(i) = distances(i) / sound_speed;% 添加测量噪声times(i) = times(i) + randn() * noise_std;end% 计算时间差 (相对于第一个信标)tdoa = times - times(1);%% 3.2 位置估计estimated_pos = simple_tdoa_solve(beacons, tdoa(2:end)*sound_speed);% 记录轨迹和误差trajectory(step, :) = auv_pos;traj_est(step, :) = estimated_pos;errors(step) = norm(estimated_pos - auv_pos);fprintf('步骤 %d: 真实位置 [%.1f,%.1f,%.1f], 估计位置 [%.1f,%.1f,%.1f], 误差: %.4fm\n', ...step, auv_pos, estimated_pos, errors(step));
完整代码的下载链接:https://download.csdn.net/download/callmeup/91579488
或参考专栏文章的链接:https://blog.csdn.net/callmeup/article/details/149856084?spm=1011.2415.3001.5331
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者