车载摄像头选型相关
From : https://www.zhihu.com/people/aili-light/posts
1 L2-L4自动驾驶视觉方案推荐
(一) https://zhuanlan.zhihu.com/p/475817226
(二) https://zhuanlan.zhihu.com/p/475832413
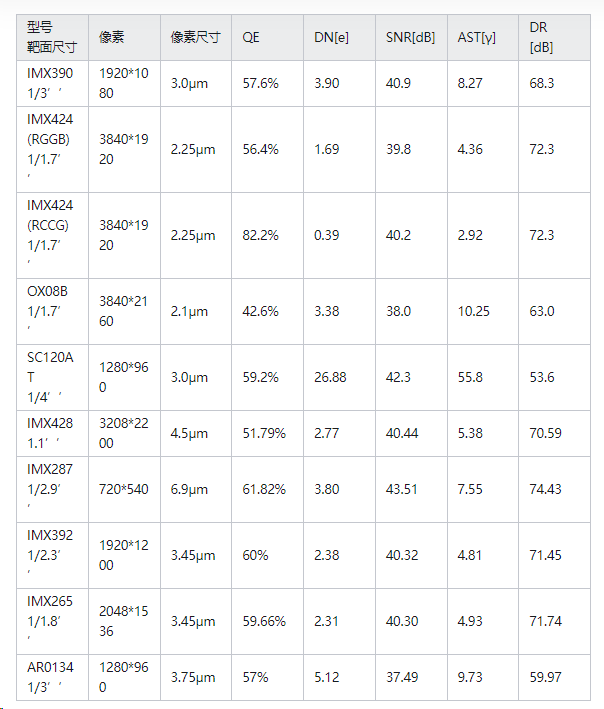
2 CMOS图像传感器的参数和评价标准
https://zhuanlan.zhihu.com/p/480707847
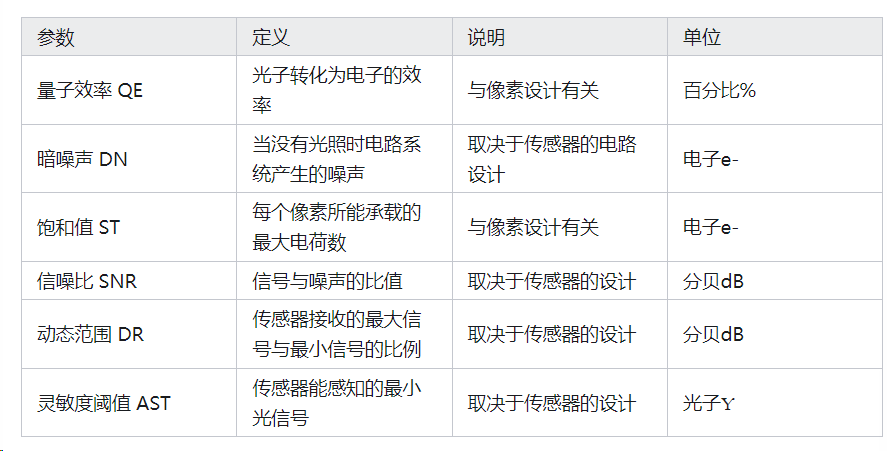
EMVA(European Machine Vision Association)1288(图1)是专为相机图像传感器的测试而设计的标准。该标准定义了一系列的参数以及规范化的测量方法,例如量子效率、动态范围、灵敏度等等。
(1) 电信号的生成
- 量子效率 QE
(2) 噪声来源
- 固定噪声
- 暂态噪声 具有一定的随机性,例如暗噪声、采样噪声等
- 暗噪声
- 信噪比
- 灵敏度阈值
- 动态范围
- 固定模式噪声
- 信号不一致性带来的偏置(offset)
- 光响应非均匀性引起的灵敏度(sensitivity)差异。
- 总结
3 详解图像传感器的测试标准EMVA1288
Ref : https://zhuanlan.zhihu.com/p/476543135