从零开始学习PX4源码23(飞行模式管理)
目录
文章目录
- 目录
- 摘要
- 1.飞行模式管理介绍
- 2.飞行模式管理类之间的关系
- 3.飞行模式管理启动代码
- 4.飞行模式管理核心函数
- 4.1 获取需要的消息
- 4.2 开始飞行任务
- 5.飞行模式管理更新
- 6.飞行模式管理总结
摘要
本节主要介绍PX4的飞行模式代码整体流程,欢迎批评指正!!!
1.飞行模式管理介绍
飞行模式主要是对PX4的手动/自动等模式进行统一管理,主要的核心代码在src/modules/flight_mode_manager文件夹下面。
2.飞行模式管理类之间的关系
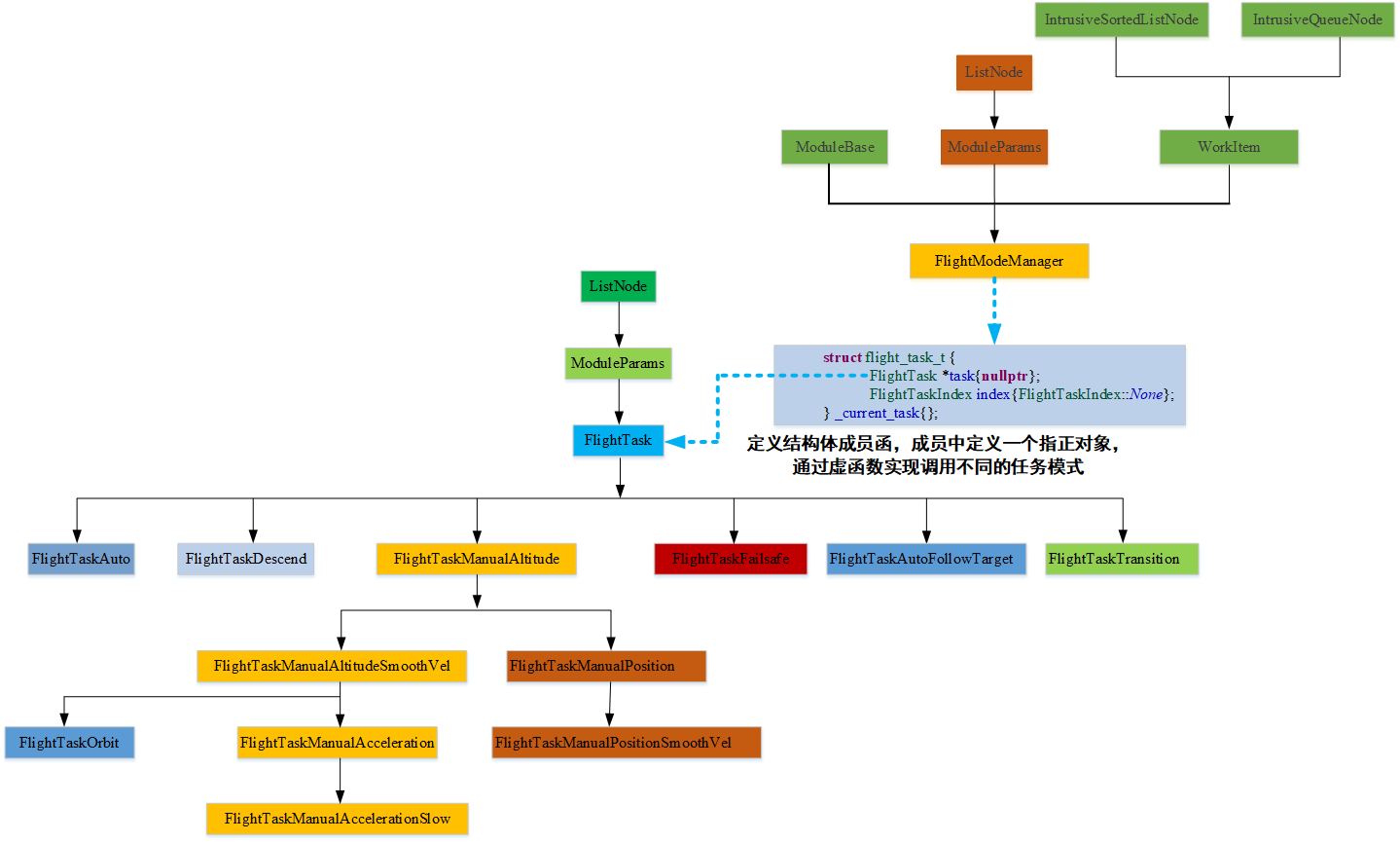
可以看出:_current_task是FlightModeManager类中的一个私有结构体flight_task_t 的成员,这个结构体起了一个名字叫_current_task;flight_task_t 是结构体里面的一个类。
struct flight_task_t