双深度Q网络(Double DQN)基础解析与python实例:训练稳定倒立摆
目录
1. 前言
2. Double DQN的核心思想
3. Double DQN 实例:倒立摆
4. Double DQN的关键改进点
5. 双重网络更新策略
6. 总结
1. 前言
在强化学习领域,深度Q网络(DQN)开启了利用深度学习解决复杂决策问题的新篇章。然而,标准DQN存在一个显著问题:Q值的过估计。为解决这一问题,Double DQN应运而生,它通过引入两个网络来减少Q值的过估计,从而提高策略学习的稳定性和性能。本文将深入浅出地介绍Double DQN的核心思想,并通过一个完整python实现案例,帮助大家全面理解强化这一学习算法。
2. Double DQN的核心思想
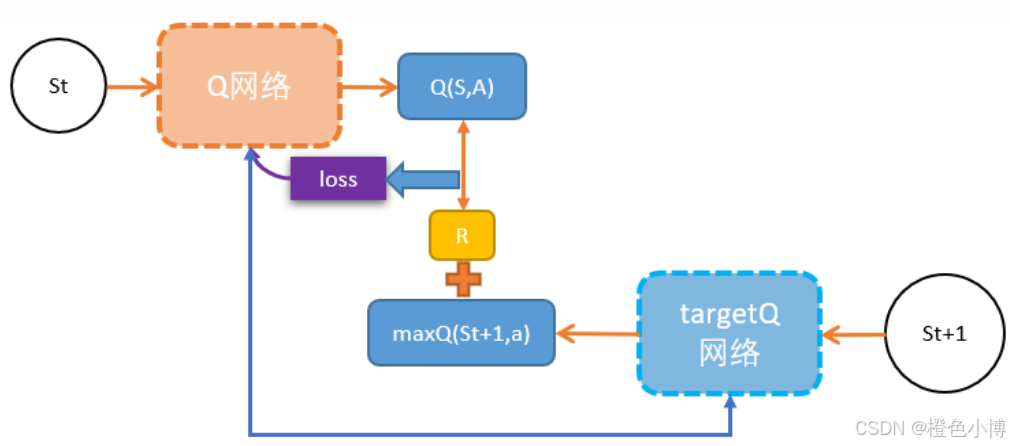
标准DQN使用同一个网络同时选择动作和评估动作价值,这容易导致Q值的过估计。Double DQN通过将动作选择和价值评估分离到两个不同的网络来解决这个问题:
-
一个网络(在线网络)用于选择当前状态下的最佳动作
-
另一个网络(目标网络)用于评估这个动作的价值
这种分离减少了自举过程中动作选择和价值评估的关联性,从而有效降低了Q值的过估计。
结构如下:
3. Double DQN 实例:倒立摆
接下来,我们将实现一个完整的Double DQN,解决CartPole平衡问题。这个例子包含了所有关键组件:
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
import gym
import random
from collections import deque# 1. 定义DQN网络结构
class DQN(nn.Module):def __init__(self, state_dim, action_dim):super(DQN, self).__init__()self.fc1 = nn.Linear(state_dim, 128)self.fc2 = nn.Linear(128, 128)self.fc3 = nn.Linear(128, action_dim)def forward(self, x):x = torch.relu(self.fc1(x))x = torch.relu(self.fc2(x))x = self.fc3(x)return x# 2. 经验回放缓冲区
class ReplayBuffer:def __init__(self, capacity):self.buffer = deque(maxlen=capacity)def add(self, state, action, reward, next_state, done):self.buffer.append((state, action, reward, next_state, done))def sample(self, batch_size):samples = random.sample(self.buffer, batch_size)states, actions, rewards, next_states, dones = zip(*samples)return states, actions, rewards, next_states, donesdef __len__(self):return len(self.buffer)# 3. Double DQN代理
class DoubleDQNAgent:def __init__(self, state_dim, action_dim):self.policy_net = DQN(state_dim, action_dim)self.target_net = DQN(state_dim, action_dim)self.target_net.load_state_dict(self.policy_net.state_dict())self.target_net.eval()self.optimizer = optim.Adam(self.policy_net.parameters(), lr=0.001)self.replay_buffer = ReplayBuffer(10000)self.batch_size = 64self.gamma = 0.99 # 折扣因子self.epsilon = 1.0 # 探索率self.epsilon_decay = 0.995self.min_epsilon = 0.01self.action_dim = action_dim# 根据ε-greedy策略选择动作def select_action(self, state):if random.random() < self.epsilon:return random.randint(0, self.action_dim - 1)else:with torch.no_grad():return self.policy_net(torch.FloatTensor(state)).argmax().item()# 存储经验def store_transition(self, state, action, reward, next_state, done):self.replay_buffer.add(state, action, reward, next_state, done)# 更新网络def update(self):if len(self.replay_buffer) < self.batch_size:return# 从经验回放中采样states, actions, rewards, next_states, dones = self.replay_buffer.sample(self.batch_size)# 转换为PyTorch张量states = torch.FloatTensor(states)actions = torch.LongTensor(actions)rewards = torch.FloatTensor(rewards)next_states = torch.FloatTensor(next_states)dones = torch.FloatTensor(dones)# 计算当前Q值current_q = self.policy_net(states).gather(1, actions.unsqueeze(1)).squeeze(1)# 计算目标Q值(使用Double DQN方法)# 使用策略网络选择动作,目标网络评估价值with torch.no_grad():# 从策略网络中选择最佳动作policy_actions = self.policy_net(next_states).argmax(dim=1)# 从目标网络中评估这些动作的值next_q = self.target_net(next_states).gather(1, policy_actions.unsqueeze(1)).squeeze(1)target_q = rewards + self.gamma * next_q * (1 - dones)# 计算损失并优化loss = nn.MSELoss()(current_q, target_q)self.optimizer.zero_grad()loss.backward()self.optimizer.step()# 更新目标网络(软更新)for target_param, policy_param in zip(self.target_net.parameters(), self.policy_net.parameters()):target_param.data.copy_(0.001 * policy_param.data + 0.999 * target_param.data)# 减少探索率self.epsilon = max(self.min_epsilon, self.epsilon * self.epsilon_decay)# 训练过程def train_double_dqn():# 创建环境env = gym.make('CartPole-v1')state_dim = env.observation_space.shape[0]action_dim = env.action_space.n# 创建代理agent = DoubleDQNAgent(state_dim, action_dim)# 训练参数episodes = 500max_steps = 500# 训练循环for episode in range(episodes):state, _ = env.reset()total_reward = 0for step in range(max_steps):action = agent.select_action(state)next_state, reward, done, _, _ = env.step(action)# 修改奖励以加速学习reward = reward if not done else -10agent.store_transition(state, action, reward, next_state, done)agent.update()total_reward += rewardstate = next_stateif done:break# 每10个episodes更新一次目标网络if episode % 10 == 0:agent.target_net.load_state_dict(agent.policy_net.state_dict())print(f"Episode: {episode + 1}, Total Reward: {total_reward}, Epsilon: {agent.epsilon:.2f}")env.close()# 执行训练
if __name__ == "__main__":train_double_dqn()
4. Double DQN的关键改进点
-
双网络结构:通过将动作选择(策略网络)和价值评估(目标网络)分离,减少了Q值的过估计。
-
经验回放:通过存储和随机采样历史经验,打破了数据的相关性,提高了学习稳定性。
-
ε-greedy策略:平衡探索与利用,随着训练进行逐渐减少探索概率。
目标网络在Double DQN中扮演着非常重要的角色:
-
它为策略网络提供稳定的目标Q值
-
通过延迟更新,减少了目标Q值的波动
-
与策略网络共同工作,实现了动作选择和价值评估的分离
5. 双重网络更新策略
在Double DQN中,我们使用了软更新(soft update)策略来更新目标网络:
for target_param, policy_param in zip(self.target_net.parameters(), self.policy_net.parameters()):target_param.data.copy_(0.001 * policy_param.data + 0.999 * target_param.data)这种软更新方式比传统的目标网络定期硬更新(hard update)更平滑,有助于训练过程的稳定。
6. 总结
本文通过详细讲解Double DQN的原理,并提供了完整的python实现代码,展示了如何应用这一先进强化学习算法解决实际问题。与标准DQN相比,Double DQN通过引入双网络结构,有效解决了Q值过估计问题,提高了策略学习的稳定性和最终性能。Double DQN是强化学习领域的一个重要进步,为后续更高级的算法(如Dueling DQN、C51、Rainbow DQN等)奠定了基础。通过理解Double DQN的原理和实现,读者可以为进一步探索复杂强化学习算法打下坚实基础。在实际应用中,可以根据具体任务调整网络结构、超参数(如学习率、折扣因子、经验回放缓冲区大小等)以及探索策略,以获得最佳性能。