蓝桥杯框架-按键数码管
蓝桥杯框架-按键数码管
- 一,代码移植
- 二,如何使用
一,代码移植
上一节已经一步步移植了led模板,本节移植按键和数码管的模板,但我不会再教移植,我直接给出main.c,key.c,key.h,seg.c,seg.h,init.c,init.h的代码,你们自己移植
main.c代码
/*头文件区域*/
#include <STC15F2K60S2.H>//单片机寄存器专用头文件
#include <Init.h>//初始化底层驱动专用头文件
#include <Led.h>//Led底层驱动专用头文件
#include <Key.h>//按键底层驱动专用头文件
#include <Seg.h>//数码管底层驱动专用头文件/*变量声明区域*/
unsigned char Led_Pos;
unsigned char ucLed[8] = {0,0,0,0,0,0,0,0};//Led显示数据存放数组unsigned char Key_Val,Key_Down,Key_Old,Key_Up;//按键专用变量
unsigned char Key_Slow_Down;//按键减速专用变量unsigned char Seg_Buf[8] = {10,10,10,10,10,10,10,10};//数码管显示数据存放数组
unsigned char Seg_Point[8] = {0,0,0,0,0,0,0,0};//数码管小数点数据存放数组
unsigned char Seg_Pos;//数码管扫描专用变量
unsigned int Seg_Slow_Down;//数码管减速专用变量/*任务函数区域*/
void Led_Proc()
{ucLed[0]=1;ucLed[2]=1;ucLed[3]=1;
}void Key_Proc()
{if(Key_Slow_Down) return;Key_Slow_Down = 1;//键盘减速程序Key_Val = Key_Read();//实时读取键码值Key_Down = Key_Val & (Key_Old ^ Key_Val);//捕捉按键下降沿Key_Up = ~Key_Val & (Key_Old ^ Key_Val);//捕捉按键上降沿Key_Old = Key_Val;//辅助扫描变量}void Seg_Proc()
{unsigned char i=0;if(Seg_Slow_Down) return;Seg_Slow_Down = 1;//数码管减速程序}/* 定时器0中断初始化函数 */
void Timer0Init(void) //1毫秒@12.000MHz
{AUXR &= 0x7F; //定时器时钟12T模式TMOD &= 0xF0; //设置定时器模式TL0 = 0x18; //设置定时初始值TH0 = 0xFC; //设置定时初始值TF0 = 0; //清除TF0标志TR0 = 1; //定时器0开始计时ET0 = 1; //定时器中断0打开EA = 1; //总中断打开
}
/* 定时器0中断服务函数 */
void Timer0Server() interrupt 1
{ if(++Key_Slow_Down == 10) Key_Slow_Down = 0;//键盘减速专用if(++Seg_Slow_Down == 100) Seg_Slow_Down = 0;//数码管减速专用if(++Seg_Pos == 8) Seg_Pos = 0;//数码管显示专用 //012345678/8个Led/8个Segif(++Led_Pos== 8) Led_Pos= 0;Seg_Disp(Seg_Pos,Seg_Buf[Seg_Pos],Seg_Point[Seg_Pos]);Led_Disp(Led_Pos,ucLed[Led_Pos]);
}/* Main */
void main()
{System_Init(); //关闭外设Timer0Init();while (1){Key_Proc();Seg_Proc();Led_Proc();}
}
key.c代码:板子下面的接线端子要连接KBD(矩阵按键)
#include <Key.h>unsigned char Key_Read()
{unsigned char temp = 0; //局部变量初始化为0P44 = 0;P42 = 1;P35 = 1;P34 = 1;if(P33 == 0) temp = 4; //P3变小,temp变大if(P32 == 0) temp = 5;if(P31 == 0) temp = 6;if(P30 == 0) temp = 7;P44 = 1;P42 = 0;P35 = 1;P34 = 1;if(P33 == 0) temp = 8;if(P32 == 0) temp = 9;if(P31 == 0) temp = 10;if(P30 == 0) temp = 11;P44 = 1;P42 = 1;P35 = 0;P34 = 1;if(P33 == 0) temp = 12;if(P32 == 0) temp = 13;if(P31 == 0) temp = 14;if(P30 == 0) temp = 15;P44 = 1;P42 = 1;P35 = 1;P34 = 0;if(P33 == 0) temp = 16;if(P32 == 0) temp = 17;if(P31 == 0) temp = 18;if(P30 == 0) temp = 19;return temp;
}/*
unsigned char Key_Read()
{unsigned char temp = 0;if(P33 == 0) temp = 4;if(P32 == 0) temp = 5;if(P31 == 0) temp = 6;if(P30 == 0) temp = 7;return temp;
}
*/
seg.c代码
#include <Seg.h>unsigned char seg_dula[] = {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff};//0-0,1-1,2-2,3-3,4-4,5-5,6-6,7-7,8-8,9-9,10-熄灭
unsigned char seg_wela[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};void Seg_Disp(unsigned char wela,dula,point)
{P0 = 0xff;P2 = P2 & 0x1f | 0xe0;P2 &= 0x1f;P0 = seg_wela[wela];P2 = P2 & 0x1f | 0xc0;P2 &= 0x1f;//STC-ISP提供共阴极数码管P0 = seg_dula[dula]; //共阳极数码管 //预给P0数据if(point) //第8位/dp位赋值,不改变低7位P0 &= 0x7f;P2 = P2 & 0x1f | 0xe0; //开P2 &= 0x1f; //关
}
init.c代码:作用是下载完程序之后关闭所有外设
#include <Init.h>void System_Init()
{
/**************关闭Led外设*************/P0 = 0xff; //(LE=0:****)使锁存器预关闭外设P2 = P2 & 0x1f | 0x80; //&0x1f:高3位/译码器清0,低5位不动 //|0x80/C-1 B-0 A-0:给译码器赋值/锁定锁存器(译码器ABC控制Y*,启动锁存器)P2 &= 0x1f; //释放译码器(只用一瞬间,给其他外设使用)/**************关闭其他外设************/P0 = 0x00;P2 = P2 & 0x1f | 0xa0;//&0x1f:高3位/译码器清0,低5位不动 //|0xa0/C-1 B-0 A-1:给译码器赋值/锁定锁存器(译码器ABC控制Y*,启动锁存器)P2 &= 0x1f;
}
所有的.h代码:引用单片机的头文件+.c中函数的声明
自己写
二,如何使用
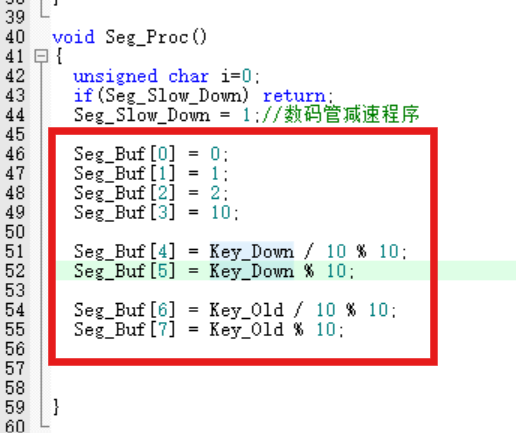
以下面代码为例
Seg_Buf[0] = 0;表示第一个数码管显示0
Seg_Buf[1] = 1;表示第二个数码管显示1
Seg_Buf[2] = 2;表示第三个数码管显示2
Seg_Buf[3] = 10;表示第四个数码管熄灭
Key_Down的值等于板子上按键的丝印号,如S7按下的一瞬间Key_Down等于7
Key_Old的值也等于板子上按键的丝印号,如S7一直按下,则Key_Old一直为7
/10%10是取是取十位数字
%10是取个位数字