一、电机篇
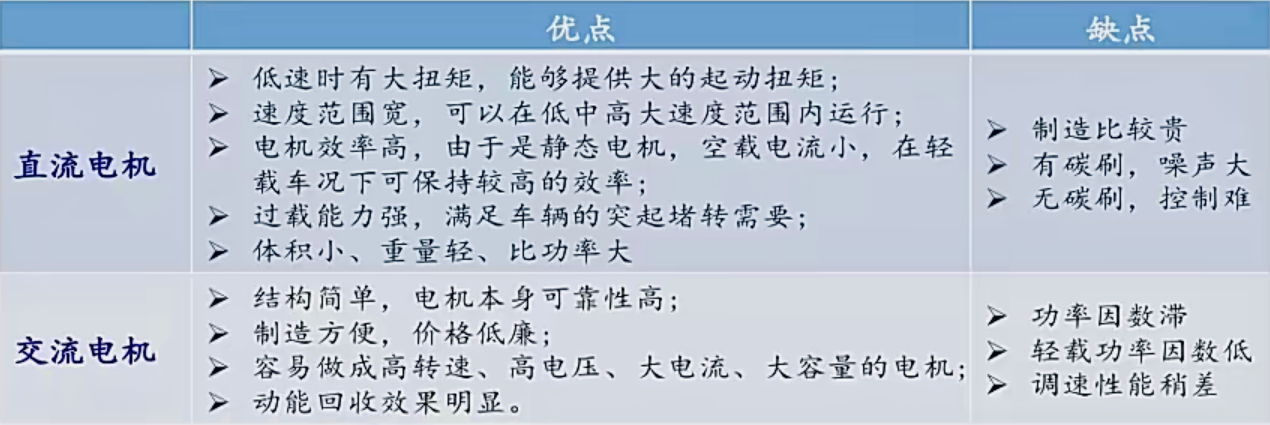
一、交流电机和直流电机
目前移动机器人使用的都是伺服电机。伺服电机是开环控制、有编码器。伺服电机又分为直流电机和交流电机。步进电机的开环控制
1. 直流电机
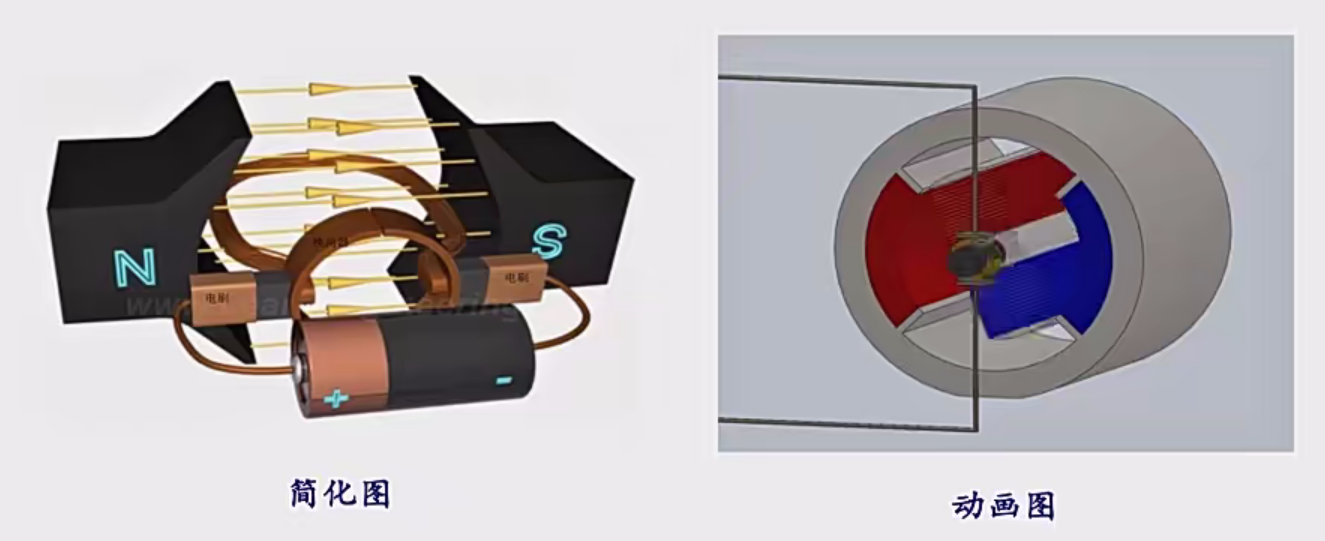
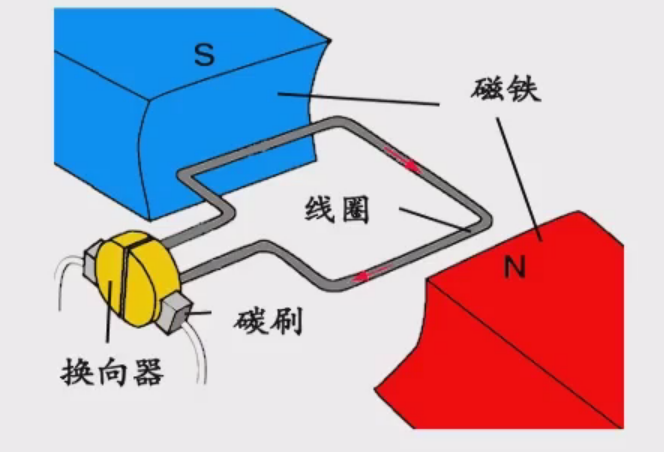
闭环原理:电流从电源正极流向右边的电刷,电刷和换向器相互摩擦,电流从换向器流入左侧线圈,经右侧线圈返回右侧电刷,最总返回电源负极。
工作原理:电圈在有N级和S级形成主磁场中会受到电磁力的作用,而左侧线圈和右侧线圈中不同的电流方向正好形成大小相同方向相反的作用力,两个电磁力形成的电磁转矩拉动了线圈的转动。
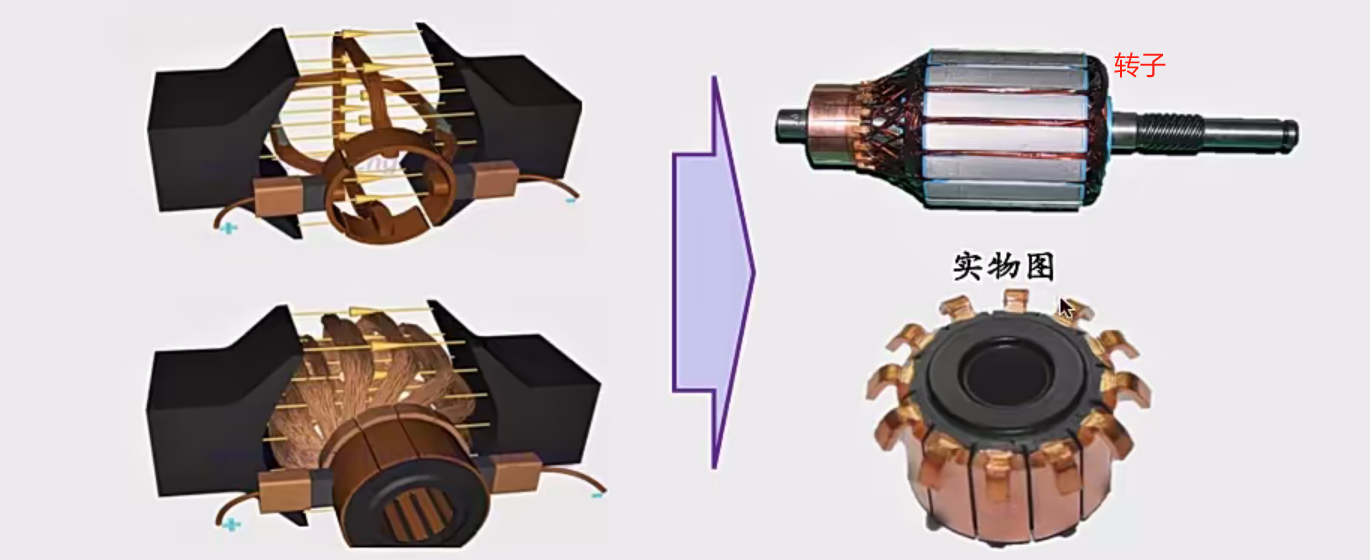
持续转动:当换向器随同线圈时转动,当右侧线圈转至左侧位置时,需要改变左右侧线圈的电流方向,从而实现持续的转矩。而电流的转换则主要通过换向器来实现。
受力均匀:通过增加线圈数量实现转子受力均匀
2. 交流电机
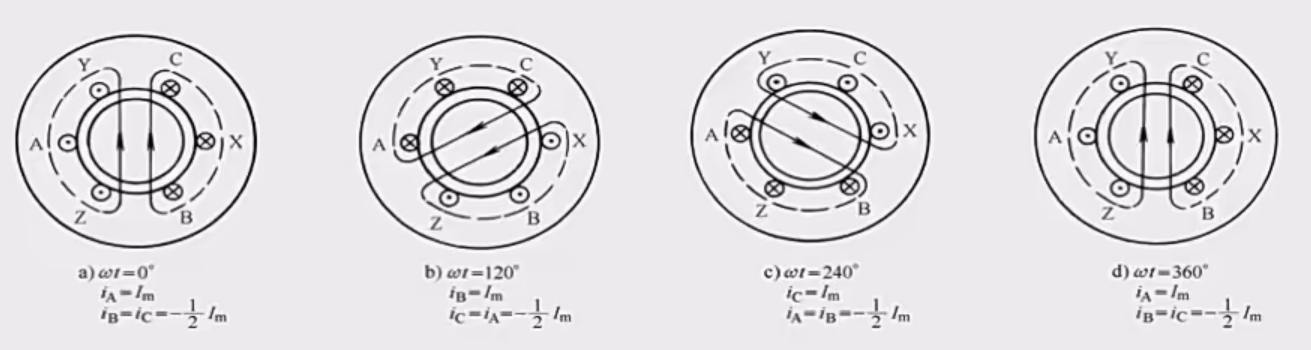
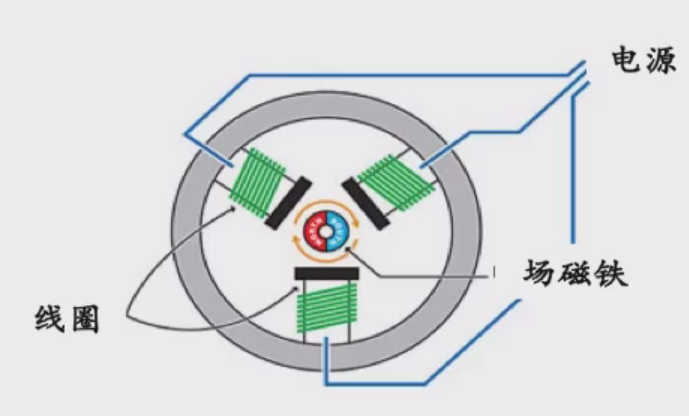
实现原理:在交流电机的定子上通过三相对称交流电,如下图所示,定子不动,仅仅通过电流的变化就能产生旋转的合成磁场,这个磁场像一个绕着定子旋转的磁铁。旋转的磁铁可以使任意一个放入该磁场内的线圈(转子)开始旋转。
交流电机中又分为同步电机和异步电机。我们一般使用异步电机会比较多一些
异步电机:定子磁场的旋转速度叫同步转速,里边的转子其实是被定子磁场牵引着在转动,所以他的转速会比定子磁场的转速慢。
3. 直流电机 VS 交流电机
由于电池输出为直流电,移动机器人常用的电机为直流电机,也有自带逆变器的交流电机。
二、有刷电机和无刷电机
直流电机主要分为有刷和无刷
1. 有刷电机
有刷电机采用机械换向,磁极不动,线圈旋转。电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机旋转的换向器和电刷来完成的。
优点:变速平稳,控制简单。整个系统温升低,可靠性好,价格低。
缺点:噪声大、效率低,碳刷易磨损,更换较为麻烦,寿命短。运行电流大,电机磁钢易退磁,降低了电机与电池的作用寿命。
2. 无刷电机
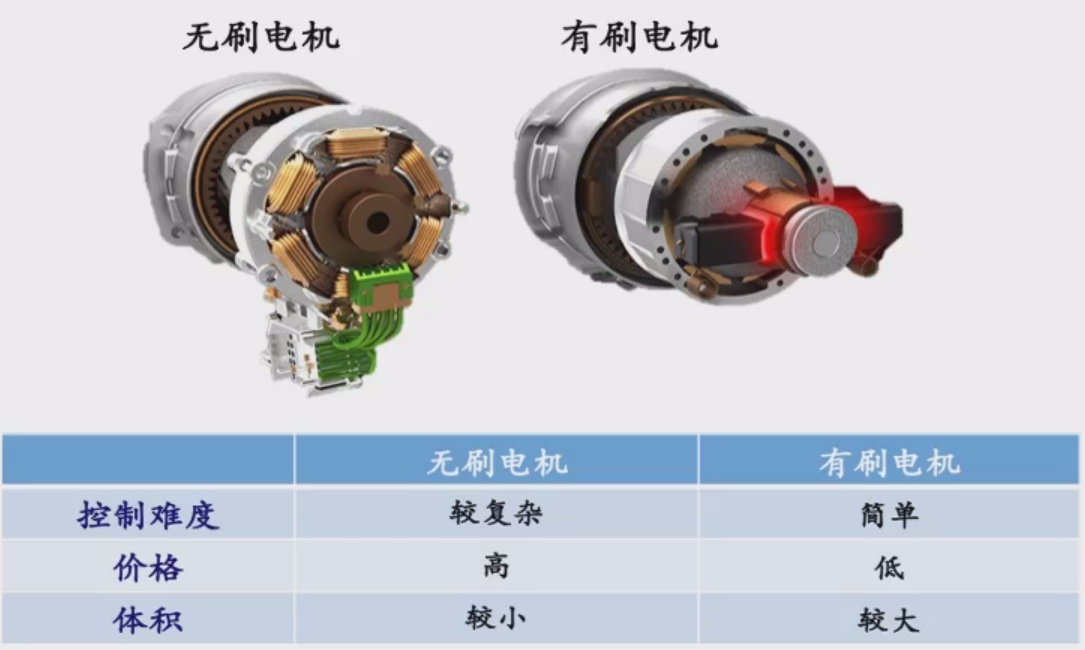
无刷电机可以想象成与有刷电机截然相反,其中永久磁性在转子上,而绕线在定子上。无刷电机没有刷子和换向器,消除了有刷式直流电机产生火花相关的劣势。
优点:性能可靠,永无磨损,故障率低,更长寿命。属静态电机,空载电流小,效率高,体积小。
缺点:低速启动时有轻微振动,速度加大换相频率增大时振动较小。价格高,控制器要求高,易形成共振。
3. 主要区别
三、移动机器人用电机选型
1. 移动机器人常用电机的关键参数
工作电压:一个电机会存在多个电压参数;其中最为常用的为连续运行条件下的额定电压;一些电机可以在额定电压之上以超过额定转速和转矩的方式运行,但是运行一段时间后可能会出现局部过热问题。
转速:电机旋转速度,一般单位为转每分钟,有时也使用弧度每秒或者角度每秒表示
转矩:电机改变旋转速度的能力;在机器人领域,转矩一般用于移动机器人的加速或减速等动作,尤其是重载情况下的机器人速度变化,转矩等于力和距离之积。
电流:对于一个电机可能存在多个电流参数,如空载电流、额定电流以及堵转电流等
物理参数:如电机尺寸、电机轴尺寸、截面尺寸以及固定孔的位置等。
其他参数:一些电机还会提供一些其他的部件,如编码器、制动器、齿轮箱、基座等等
四、配套减速器及其原理
1. 减速器的机理与作用
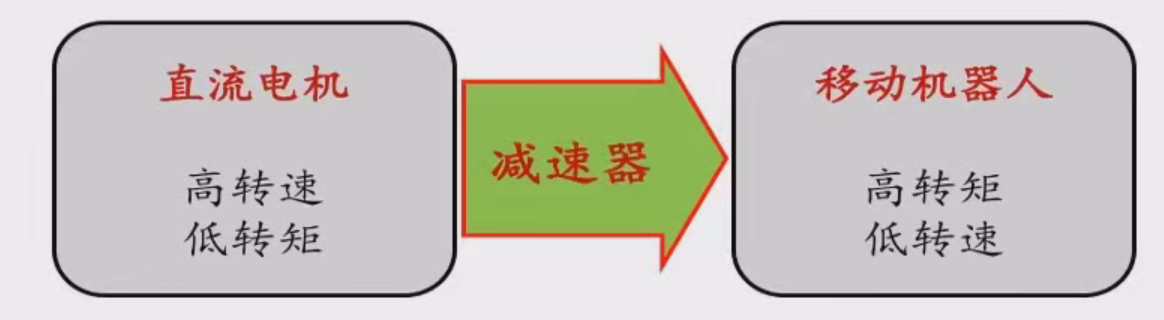
直流电机一般运行在高速低转矩运行范围内,这与机器人中电机驱动要求是矛盾的。机器人领域通常要求电机运行在低速大转矩的范围内。为了降低电机转速同时提高电机转矩,一般在电机与输出轴之间增加轴系,即减速器。通过组合不同的减速器,电机可以获得不同的额定转速与额定转矩。
2. 减速器类型
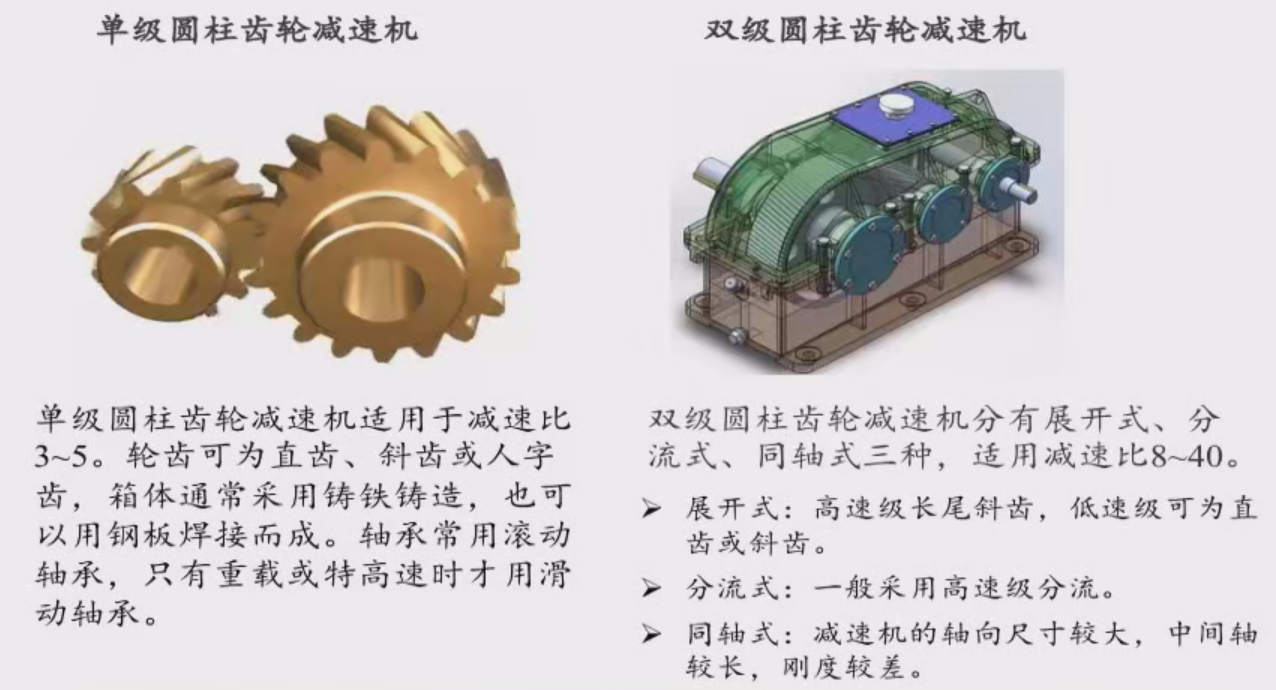
2.1 圆柱齿轮减速器
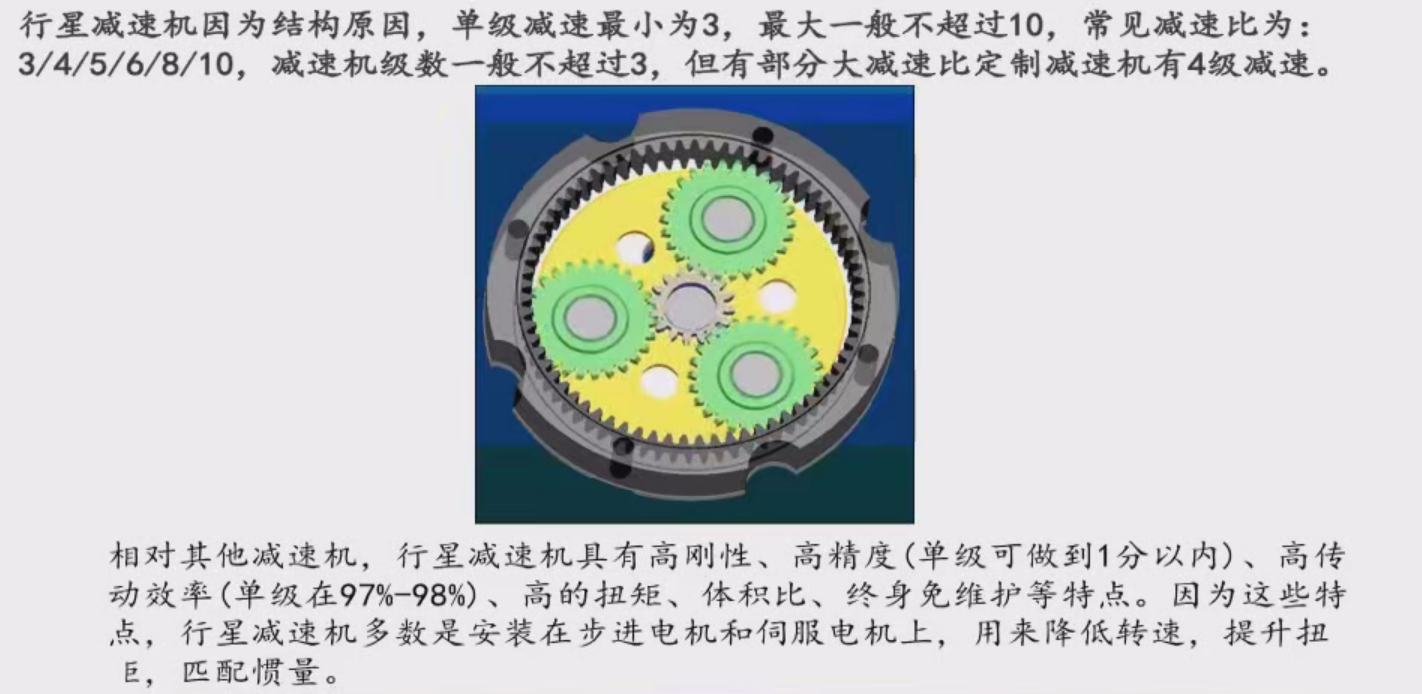
2.2 行星减速器
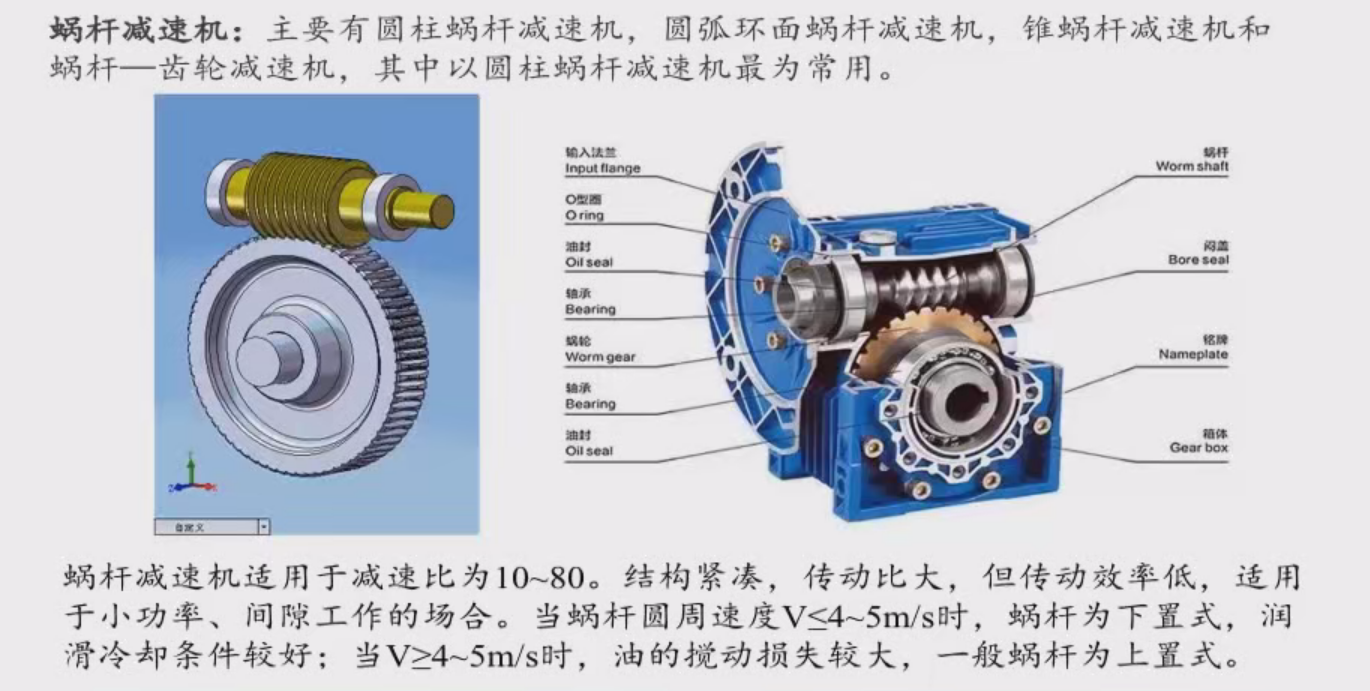
2.3 涡轮蜗杆减速器
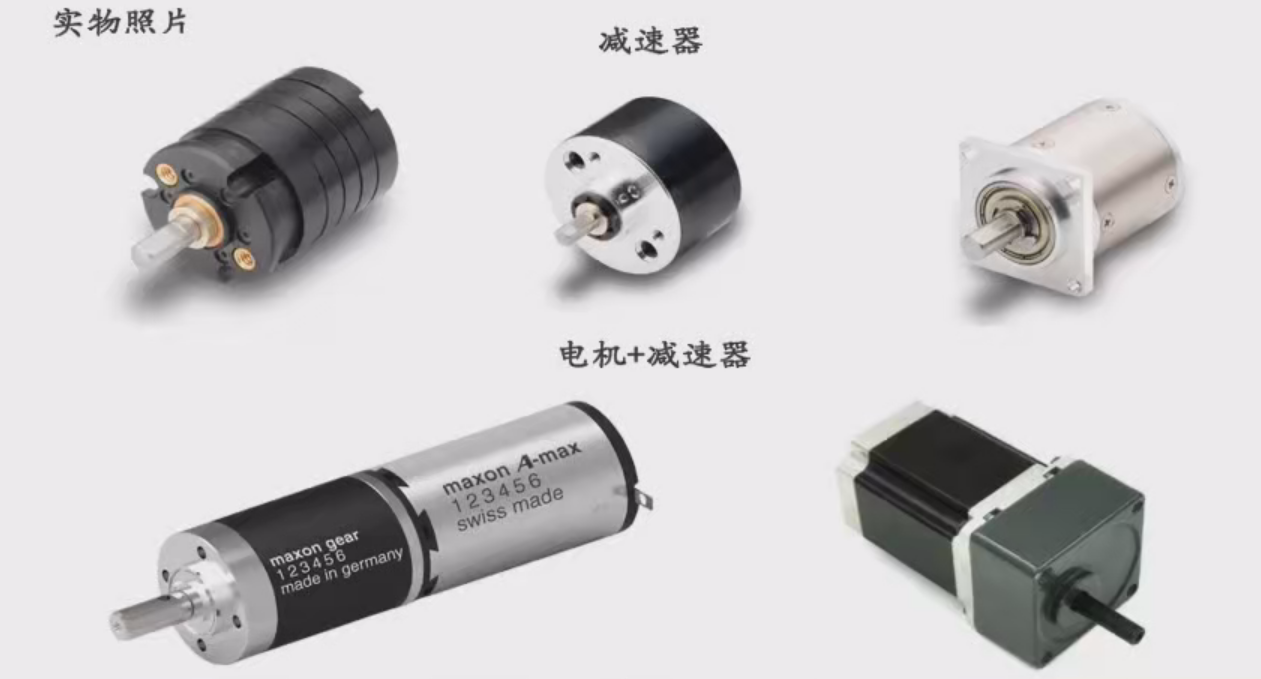
2.4 实物图
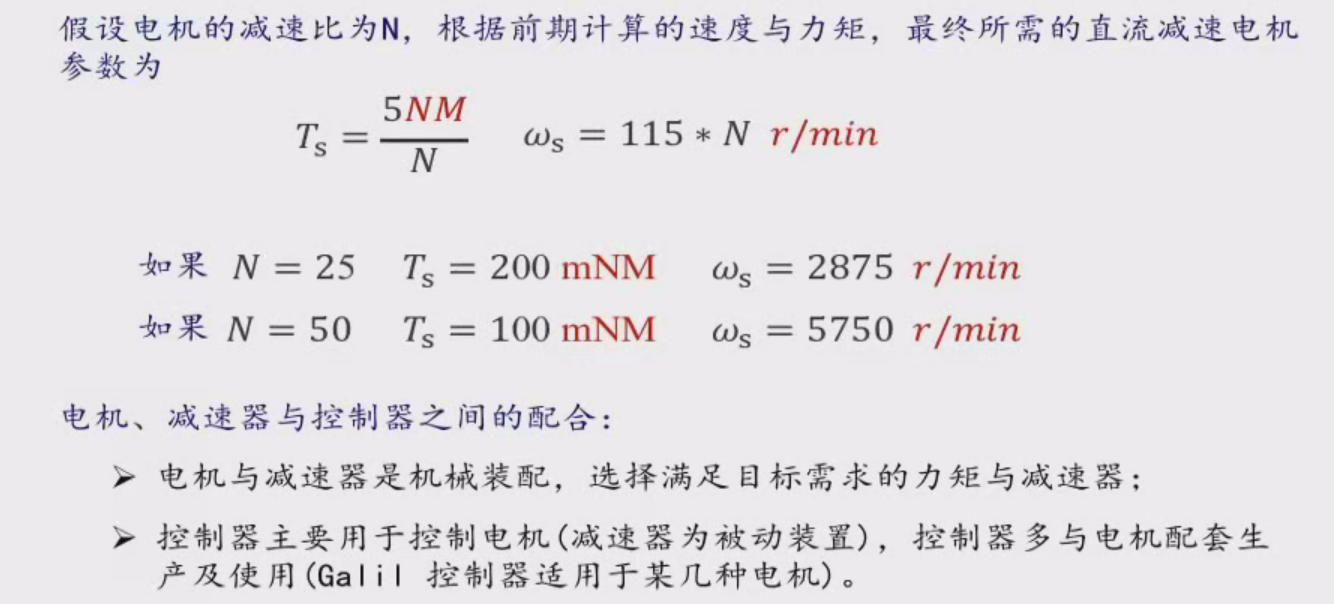
2.5 电机+减速器系统的速度力矩计算