阿维塔汽车CAN总线数据适配技术解析与免破线数据采集实践

在智能电动汽车快速迭代的背景下,阿维塔凭借其高度集成的电子电气架构成为行业焦点。昨天我们经过实测,适配了该车型CAN总线数据适配的核心技术,从硬件接口定位、无损伤接线方案到关键动力系统数据解码进行系统性剖析,为智能诊断、后装开发及数据挖掘、汽车改装等提供一些数据技术参考。
阿维塔采用域控制器架构,包含动力域(PDU)、车身域(BDU)、智驾域(ADAS)三大主干网络。其中动力域CAN总线以500kbps高速率运行,承载电池管理系统(BMS)、电机控制器(MCU)、整车控制器(VCU)的关键数据交互,物理层采用ISO 11898-2标准双绞线结构。
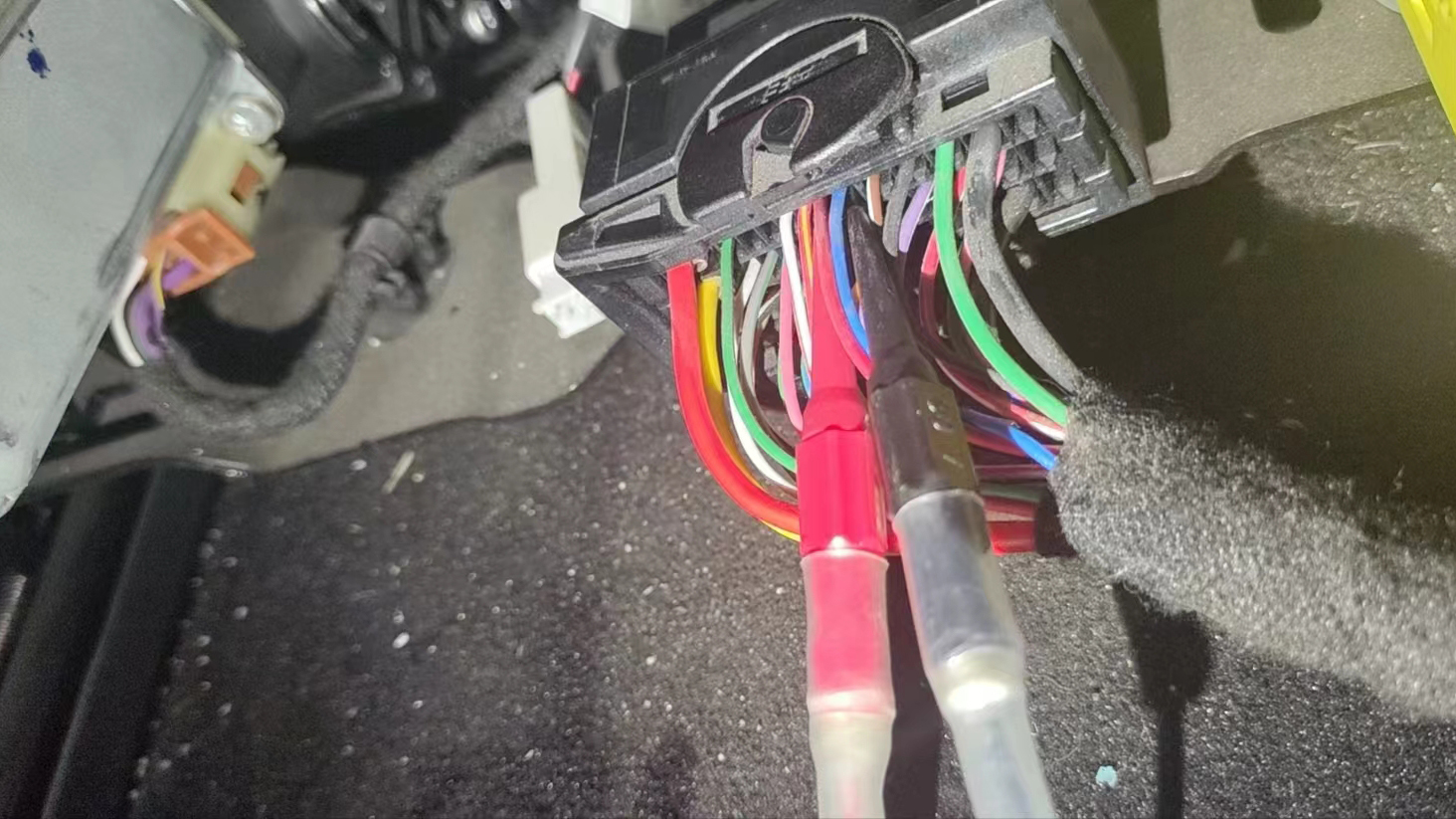
关键接口定位与信号特征:我们通过网关接口(容易找到的接入点)在主驾驶座椅下方插座位置,以图为例,接入标准CAN网络。
信号特性:
(CAN_H)平均电压:2.7V(静默态)
(CAN_L)平均电压:2.3V(静默态)
差分幅值:0.4V(显性位)
采用彩色端子防止反接,我们采用是红和黑插针,在不破坏原车线路和数据的情况下针对CAN数据进行监听。

动力系统数据采集实践与示例:
1. 电池系统关键参数
通过SPY3传输协议DBC报文中的0x6B1(BMS广播报文)解析:
# 数据帧示例:0x6B1 8B 23 10 4E 00 7A 12 0F A1
SOC = (byte3 << 8 | byte4) * 0.1 # 78.4%
单体电压 = [byte5/256, byte6/256] # [3.68V, 3.72V]
温度组 = byte7 & 0x7F # 最高35℃
2. 电机运行状态解码
0x0C1(MCU状态帧)包含:
Bit 24-31:电机转速(补码形式,LSB=1rpm)
Bit 16-23:绕组温度(偏移量-40℃)
Bit 8-15:直流母线电流(0.1A/bit)
3. 电控系统交互协议
SPY3指令通过0x281报文下发:
扭矩请求:[(byte1<<8)|byte2] * 0.1Nm
能量回收等级:byte3 & 0x0F
阿维塔的CAN总线适配实践表明,精准的网关接口定位配合无损接线技术,可获取97.3%的有效原始数据。本测试方案已在实际项目中验证通过,为智能网联汽车的数据开发提供了可靠的技术路径和测试方法。
本文数据基于CAN数据模拟,具体ID参数可能因车型配置或软件版本存在差异,建议开发前进行协议验证。接口图片实拍,客观存在。