从人体姿态到机械臂轨迹:基于深度学习的Kinova远程操控系统架构解析
在工业自动化、医疗辅助、灾难救援与太空探索等前沿领域,Kinova轻型机械臂凭借7自由度关节设计和出色负载能力脱颖而出。它能精准完成物体抓取、复杂装配和精细操作等任务。然而,实现人类操作者对Kinova机械臂的直观高效远程控制一直是技术难题。传统远程操作技术或依赖复杂昂贵的主从式机械臂系统,或需要操作者长时间训练。近期一项创新研究提出基于人工智能的远程操作解决方案,有望使Kinova机械臂的远程操作更自然高效。

现有技术局限:传统方法为何难以满足需求?
当前主流机器人远程操作技术包括主从操作和基于视觉的远程操作。主从操作要求操作者操控与目标机械臂相同运动学结构的主机械臂,成本高昂且对不同类型机械臂适应性差。基于视觉的远程操作借助摄像头捕捉手势或环境,再转换为控制指令,虽降低了成本,但在复杂光照条件下准确率下降,难以处理高实时性任务。这两种技术都未能充分利用人类肢体语言和动作意图,导致操作不自然流畅,难以满足复杂任务场景下对机械臂精准控制的需求。
研究突破:深度学习赋能Kinova机械臂远程操作
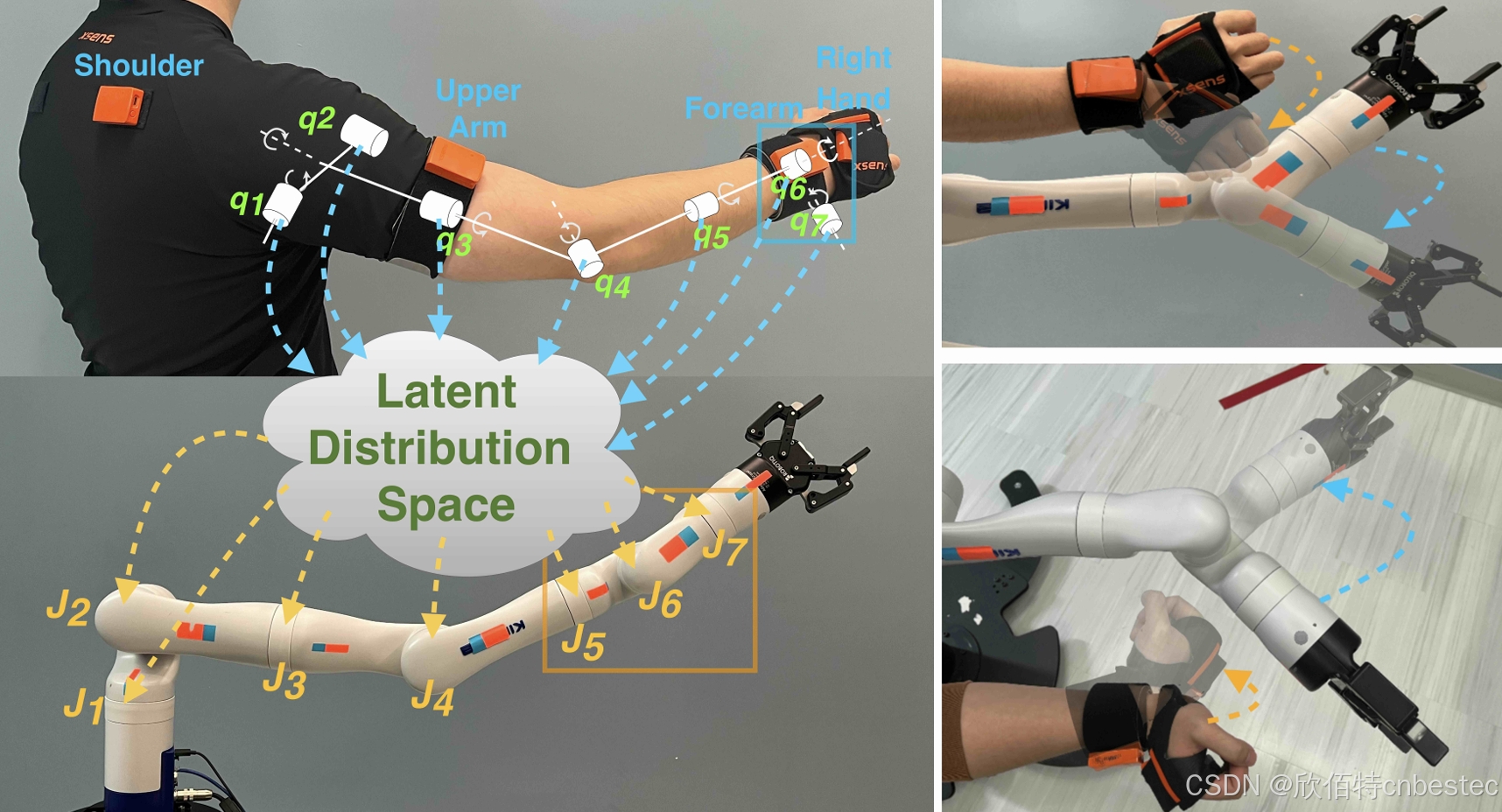
为克服传统技术局限,研究人员提出基于深度学习的新远程操作方法。核心是构建能学习Kinova机械臂配置空间潜在表示的GRU(门控循环单元)变分自动编码器(VAE)模型,并结合前馈神经网络模块实现人类手臂姿态到机械臂配置的精准映射。
数据收集:构建精准映射基础
研究团队收集了两组关键数据集。一是包含500个随机起始和结束位置的Kinova机械臂关节轨迹数据集,通过MoveIt软件生成轨迹,采用立方样条插值统一时间步长为0.1秒间隔,并将关节角度转换为投影单位值。二是人类手臂关节配置数据集,利用XSens Awinda人体骨骼运动跟踪系统,无线6自由度IMU传感器贴附在人体11个上肢部位,精确捕捉操作者右臂关节角度。通过定义机械臂与人类手臂运动学关联,将人类手臂运动模式转换为机械臂可理解的关节配置指令。
GRU-VAE模型:挖掘机械臂运动深层规律
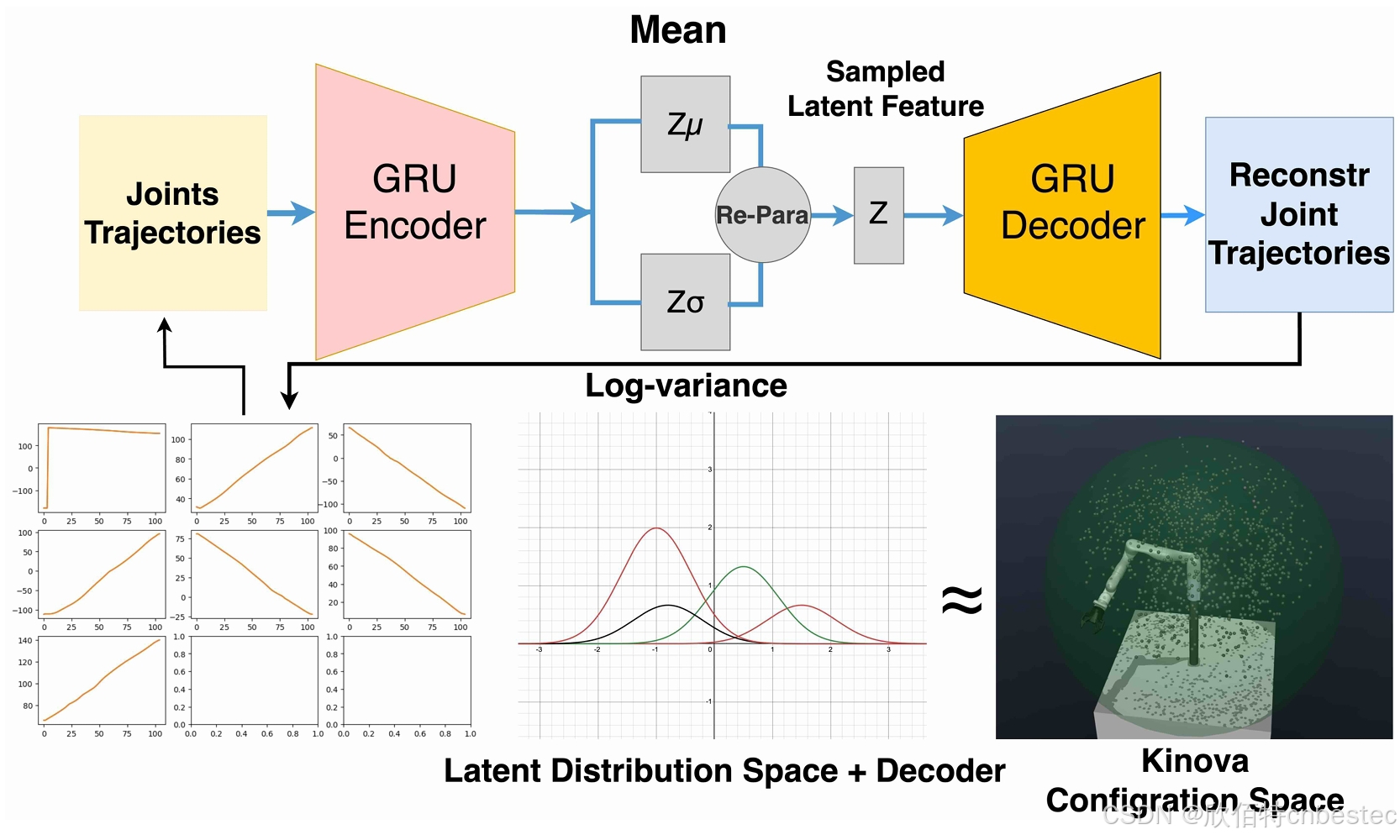
基于收集的数据,研究人员构建GRU-VAE模型。该模型以两个时间步长的关节位置轨迹为输入,利用GRU架构捕捉时序信息,对机械臂运动潜在分布进行近似。编码器将输入轨迹编码为潜在空间中的均值和对数方差,通过重参数化生成潜在特征,再由解码器重建输入轨迹。模型损失函数由轨迹重建损失和KL散度组成,通过调整β参数平衡两者权重。实验表明,采用Sigmoid退火调度器的模型训练效果更佳,为人类手臂姿态映射提供基础。
前馈神经网络:搭建人类意图到机械臂动作桥梁
为将人类手臂关节配置数据转换为机械臂可执行配置,研究团队引入前馈神经网络模块。该模块以人类手臂关节角度为输入,以VAE潜在特征空间为目标输出,通过均方误差损失函数训练。选择具有自归一化特性的SELU激活函数,降低学习难度,使网络高效学习人类手臂姿态与机械臂配置间的复杂映射关系。训练完成后,该模块能实时接收人类手臂关节角度数据,通过VAE解码器生成对应机械臂关节配置轨迹,实现人类操作意图的精准转换。
实验验证:精准与泛化能力的双重突破
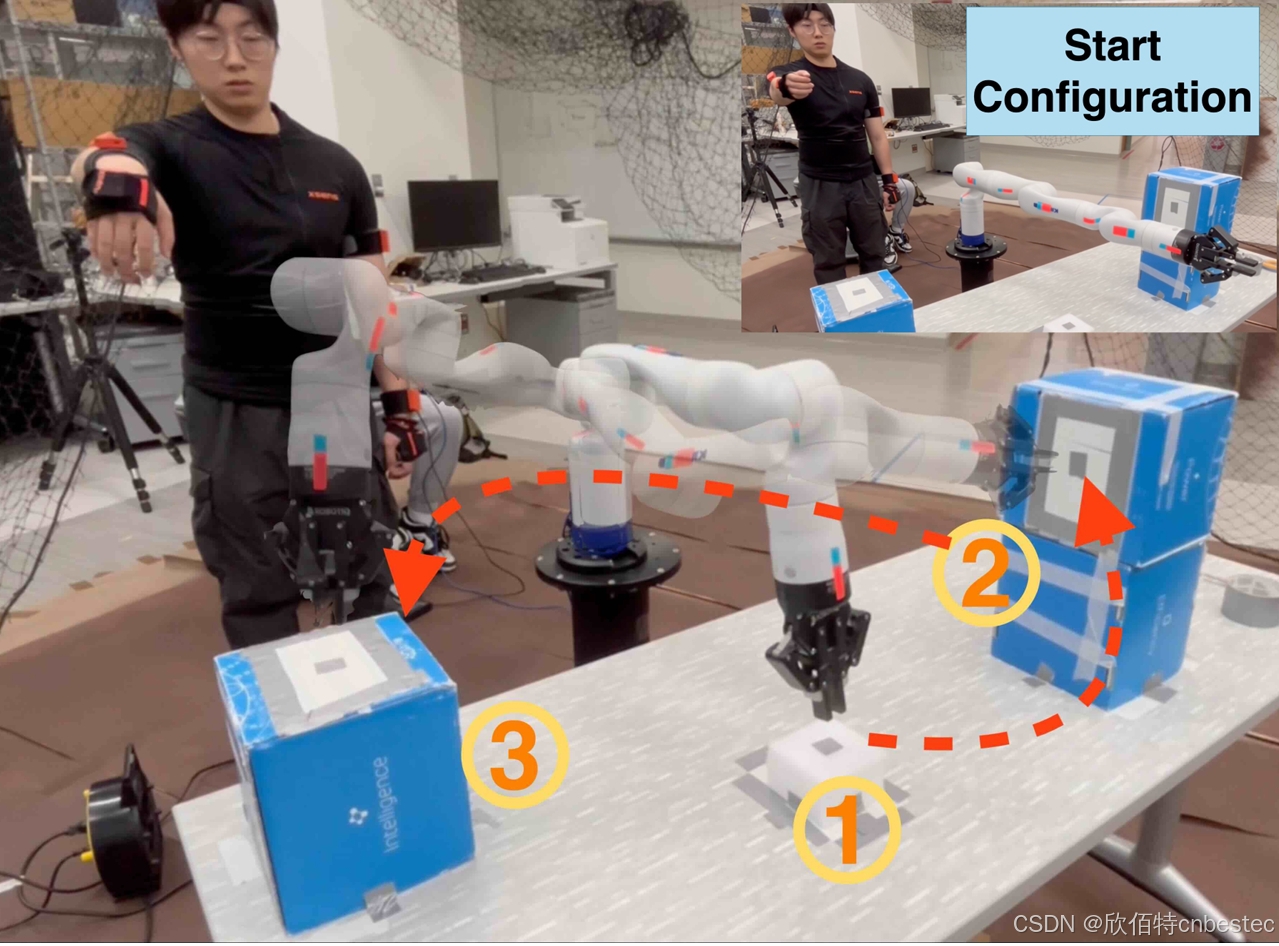
实际实验中,研究人员设置三个预定义目标姿态,要求四名参与者依次控制Kinova机械臂末端执行器抵达目标区域中心,并保持与目标区域表面垂直。结果显示,尽管参与者身体特征各异,均成功完成任务,平均绝对误差仅2.51厘米,目标姿态方向余弦相似度均值达0.97,证明系统高精度和良好泛化能力,为Kinova机械臂在多样化场景下的应用提供支持。
局限与展望:迈向更智能的Kinova机械臂操作时代
该研究虽取得显著成果,但仍存在局限。训练数据仅来自单一个体,可能导致模型对不同操作者适应性偏差。且模型主要关注关节角度映射,缺乏对关节速度信息考量,可能影响操作平滑性和响应速度。未来,研究团队计划扩大训练数据集,纳入更多个体运动模式,并融入关节速度信息,提升模型性能。同时,探索将人体躯干和骨盆运动特征纳入映射体系,增强远程操作自然性和灵活性。
这项基于GRU-VAE和前馈神经网络的Kinova机械臂远程操作技术,为实现更直观高效的人机协作开辟新路径。随着技术进步,Kinova轻型机械臂远程操作将更智能精准,为人类在复杂环境下的工作和生活带来更多便利与可能。