KUKA机器人KR 3 D1200 HM介绍
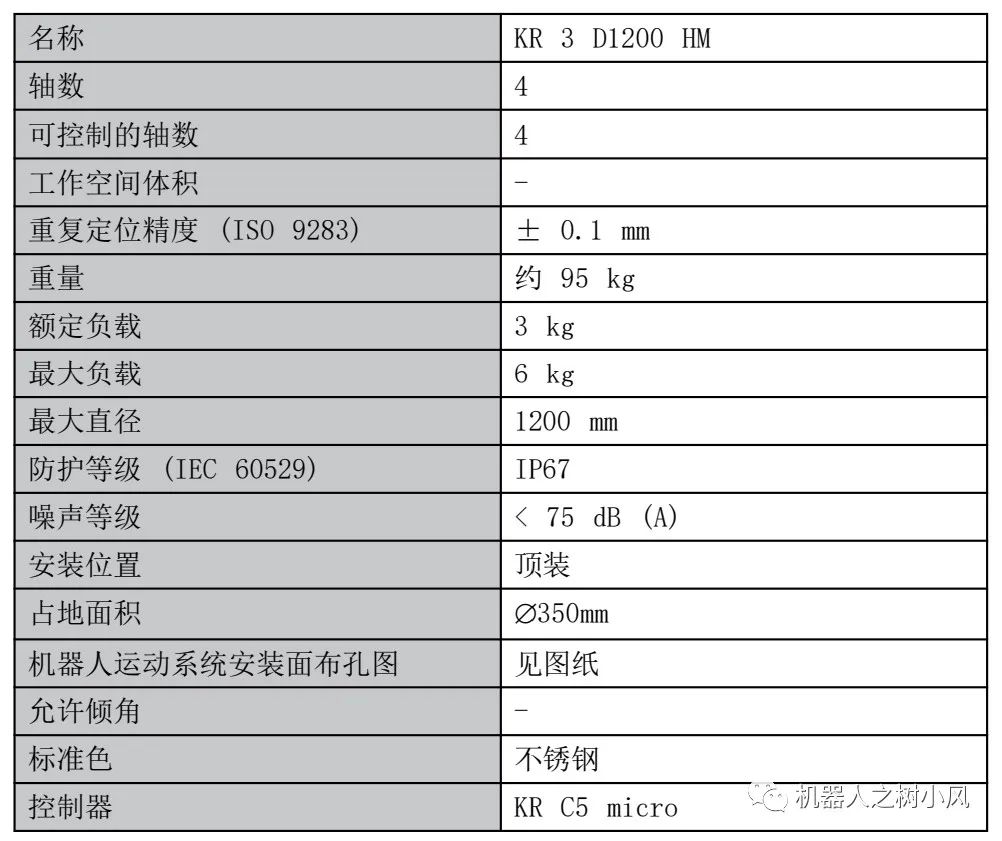
KUKA KR 3 D1200 HM是一款小型机器人,型号中HM代表“Hygienic Machine(卫生机械)用于主副食品行业”,也是一款并联机器人。用于执行高速、高精度的抓取任务。这款机器人采用食品级不锈钢设计,额定负载为3公斤,但在负载间隔缩小且具有合适的附加负载情况下,可以施加多达6公斤的最大负载。其运动范围直径为1200毫米。

KR 3 D1200 HM的特点是通常搭配KUKA的 VisionTech 视觉软件及专用软件 PickControl,可以实现多达10台机器人及传输系统的无缝集成。这种集成不仅提高了工作效率,还大大拓展了机器人的应用空间,使其能够应对包括分拣摆盘、装箱入盒、食品加工等多个应用的可能。
该型号的机器人还被广泛应用于卫生行业,如清洁、消毒等场合,在食品拣放等领域也展现出强大的实力。
关于KR 3 D1200 HM的一些技术参数如下:
①基本数据
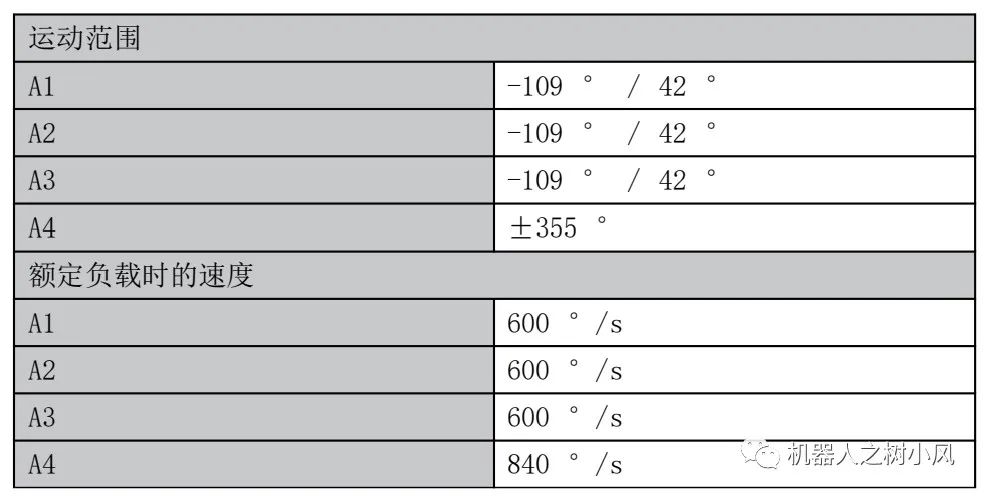
②轴数据
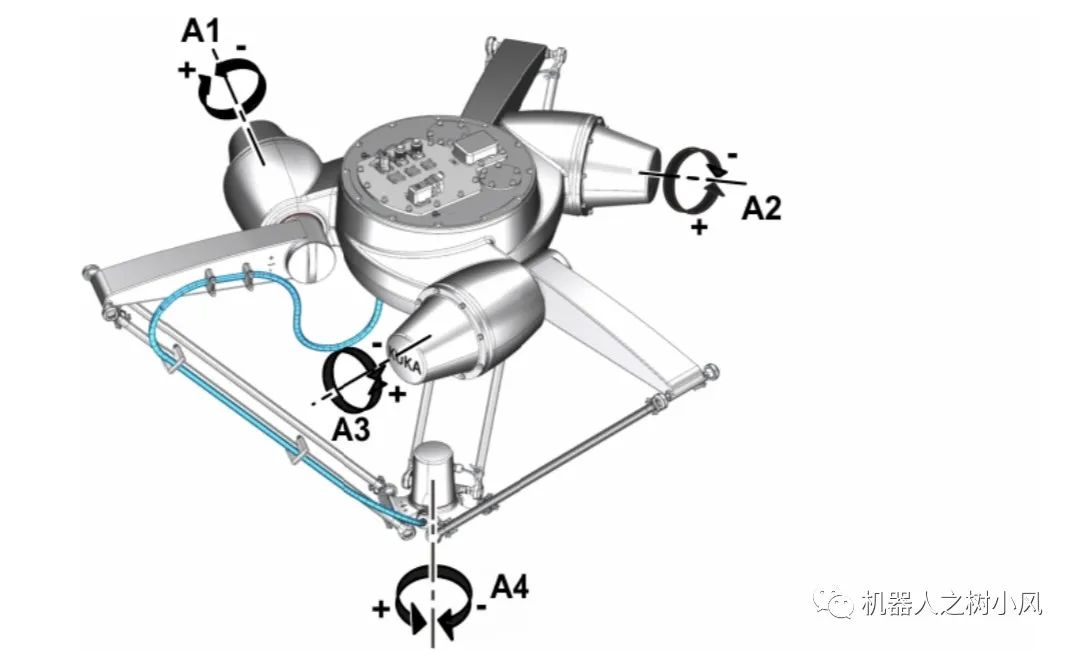
各轴的旋转方向
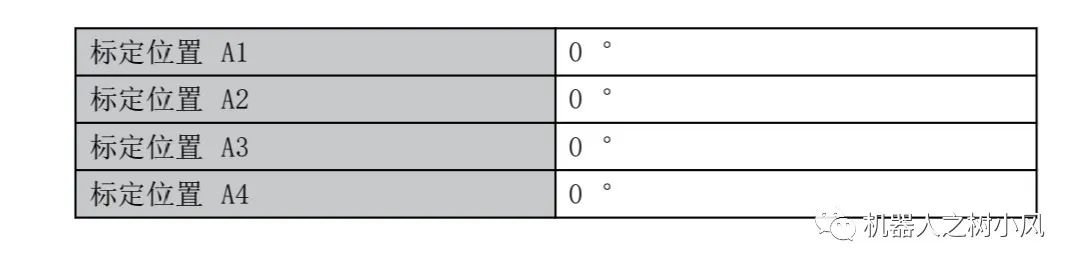
③标定位置