GoC新阶段课程研发
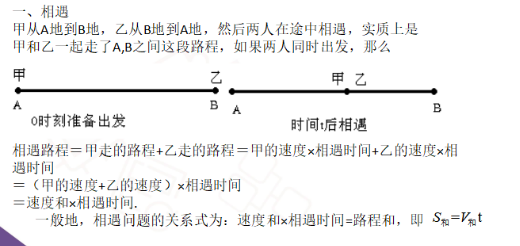
int main() {/*代码设计思路:绘制草图分析问题-代码实现求解-输出到控制台利用代码结果绘制最终示意图*///初始草图分析绘制训练pen.c(0).hide();//黑色 隐藏画笔pen.rt(90).moveTo(-180,0).oo(10,0).fd(360).oo(10);//画出369长度的直线pen.textSize(50);//书写 A B的大小pen.moveTo(-200,-50).text("A").moveTo(200,-50).text("B");pen.moveTo(-250,50).text("哪吒",1).moveTo(250,50).text("敖丙",2);pen.textSize(35);//书写文字的大小pen.moveTo(-40,-50).text("0时刻准备出发",3);//此处可以加个中断,注释掉后续代码pen.cls();//清屏---回归原始状态--后续x行可以让学生复制上面代码pen.rt(90).moveTo(-180,0).oo(10,0).fd(360).oo(10).oo(5,2).moveTo(-180,0).oo(5,1);//画出360长度的直线,圆点 红色代表哪吒,蓝色代表敖丙pen.textSize(50);//书写 A B的大小pen.moveTo(-200,-50).text("A").moveTo(200,-50).text("B");pen.textSize(50);//书写 A B的大小pen.moveTo(-200,-50).text("A").moveTo(200,-50).text("B");pen.moveTo(-250,50).text("哪吒-->",1).moveTo(250,50).text("<--敖丙",2);int s,s1,s2,v1,v2;//s是总路程,s1是哪吒的路程,s2是敖丙的路程,v1,v2分别是对应速度cin>>s>>v1>>v2;pen.text("请输入分别总路程 哪吒和敖丙的速度:");//空格分隔pen.text()pen.text(s,v1,v2);return 0;}//进阶版 将功能实现封装到函数
void Tu(){//画出360长度的直线,圆点 红色代表哪吒,蓝色代表敖丙pen.textSize(50);//书写 A B的大小pen.moveTo(-200,-50).text("A").moveTo(200,-50).text("B");pen.textSize(50);//书写 A B的大小pen.moveTo(-200,-50).text("A").moveTo(200,-50).text("B");
}
int main() {pen.speed(10);/*代码设计思路:绘制草图分析问题-代码实现求解-输出到控制台利用代码结果绘制最终示意图*///初始草图分析绘制训练pen.c(0).hide();//黑色 隐藏画笔pen.rt(90).moveTo(-180,0).oo(10,0).fd(360).oo(10);//画出369长度的直线pen.textSize(50);//书写 A B的大小pen.moveTo(-200,-50).text("A").moveTo(200,-50).text("B");pen.moveTo(-250,50).text("哪吒",1).moveTo(250,50).text("敖丙",2);pen.textSize(35);//书写文字的大小pen.moveTo(-40,-50).text("0时刻准备出发",3);//此处可以加个中断,注释掉后续代码pen.cls();//清屏---回归原始状态--后续x行可以让学生复制上面代码pen.rt(90).moveTo(-180,0).oo(10,0).fd(360).oo(10).oo(5,2).moveTo(-180,0).oo(5,1);//画出360长度的直线,圆点 红色代表哪吒,蓝色代表敖丙Tu();int s,s1,s2,v1,v2;//s是总路程,s1是哪吒的路程,s2是敖丙的路程,v1,v2分别是对应速度cin>>s>>v1>>v2;pen.moveTo(0,-100);pen.text(35);pen.text(s,v1,v2);return 0;}完整版代码
void Tu(){//画出360长度的直线,圆点 红色代表哪吒,蓝色代表敖丙pen.textSize(50);//书写 A B的大小pen.moveTo(-200,-50).text("A").moveTo(200,-50).text("B");pen.textSize(50);//书写 A B的大小pen.moveTo(-200,-50).text("A").moveTo(200,-50).text("B");
}
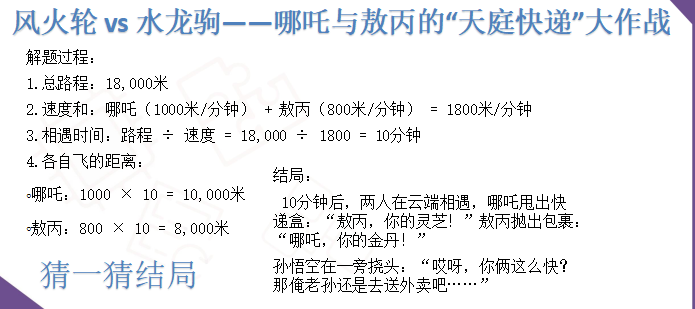
int main() {pen.speed(10);/*代码设计思路:绘制草图分析问题-代码实现求解-输出到控制台利用代码结果绘制最终示意图*///初始草图分析绘制训练pen.c(0).hide();//黑色 隐藏画笔pen.rt(90).moveTo(-180,0).oo(10,0).fd(360).oo(10);//画出369长度的直线pen.textSize(50);//书写 A B的大小pen.moveTo(-200,-50).text("A").moveTo(200,-50).text("B");pen.moveTo(-250,50).text("哪吒",1).moveTo(250,50).text("敖丙",2);pen.textSize(35);//书写文字的大小pen.moveTo(-40,-50).text("0时刻准备出发",3);//此处可以加个中断,注释掉后续代码pen.cls();//清屏---回归原始状态--后续x行可以让学生复制上面代码pen.rt(90).moveTo(-180,0).oo(10,0).fd(360).oo(10).oo(5,2).moveTo(-180,0).oo(5,1);//画出360长度的直线,圆点 红色代表哪吒,蓝色代表敖丙Tu();//调用函数int s,s1,s2,v1,v2,t;//s是总路程,s1是哪吒的路程,s2是敖丙的路程,v1,v2分别是对应速度cin>>s>>v1>>v2;t=s/(v1+v2);s1=v1*t;s2=v2*t;pen.moveTo(-150,-100).text(t).moveTo(10,-100).text("分钟后相遇");//自行设计输入输出数据大小问题//绘制示意图--先回到A点//cout<<s1<<" "<<s2;pen.moveTo(-180,0).c(1).fd(s1/50).oo(20,1).moveTo(180,0).rt(180).fd(s2/50).oo(10,2);//注意此处fd的参数是按照绘制比例来的 //输出各自飞行距离(对照示意图讲解即可)pen.textSize(30);//设定字体大小pen.moveTo(-200,-200).text("哪吒:",1);pen.moveTo(-200,-300).text("敖丙:",2);pen.moveTo(-100,-200).text(v1,1).moveTo(0,-200).text("X",1).moveTo(100,-200).text(t,1).moveTo(200,-200).text("=",1).moveTo(300,-200).text(s1,1).moveTo(380,-200).text("米",1);pen.moveTo(-100,-300).text(v2,2).moveTo(0,-300).text("X",2).moveTo(100,-300).text(t,2).moveTo(200,-300).text("=",2).moveTo(300,-300).text(s2,2).moveTo(380,-300).text("米",2);return 0;}