迪士尼机器人BD-X 概况
这些机器人代表着迪士尼故事叙述与非凡创新的完美结合。它们不仅栩栩如生,还配备了先进的技术。
-迪士尼幻想工程研发部高级副总裁凯尔·劳克林
幕景
BDX 机器人是由华特迪士尼公司的研究和幻想工程部门利用NVIDIA人工智能技术 (AI)开发的现实世界机器人,这是他们与 NVIDIA 和Google DeepMind AI 实验室合作的一部分。最初的机器人开发不到一年,用两个操纵杆手动操作,但它们比迪士尼现有的电子动画系统更复杂,因为幻想工程师使用基于艺术家动画的强化学习,让机器人通过实时模拟在各种地形上导航时以模仿的动作移动。每个机器人都有两台 NVIDIA Jetson 电脑,头部和颈部有 4 个执行器,每条腿有 5 个执行器。每个单元都由 3D 打印的组件、传感器、摄像头和 LED 组成。[ 3 ] 2023 年10 月 ,迪士尼幻想工程师向大家揭开了它们神秘的面纱,当时三台“训练中的机器人”在加州迪士尼乐园的星球大战:银河边缘主题园区漫游。 “游戏测试”表明,这些机器人可以在不平坦的地面上行走,跳舞时不会失去平衡,并能根据预设的反应与客人“互动”。[ 4 ]
BDX 机器人随后于2025 年3月 8 日在 Disney Experience SXSW 大会上亮相,幻想工程师们在会上解释了他们通过强化学习和模拟技术研发机器人的过程。乔恩·费儒随后透露,BDX 机器人将出现在2026 年的电影《曼达洛人》和《格罗古》中。它们还将于 2025 年登陆佛罗里达州的华特迪士尼世界、巴黎迪士尼乐园[ 10 ] ,届时将用铣削零件取代 3D 打印零件以适应佛罗里达的炎热天气。[ 3 ]十天后的3 月 18日,在 NVIDIA 的AI 大会上,首席执行官黄仁勋宣布,公司正与 Google DeepMind 和迪士尼研究院合作,进一步开发 Newton,这是一款先进的物理引擎,可让 AI 模型进行精确而高速的训练。一台名为“蓝色”的 BDX 机器人与黄仁勋一起在舞台上亮相,与 Newton 一起运行。[ 11 ] NVIDIA 的开源了蓝色BDX(Blue Open-Source Robot)。
disney 对机器人的思考
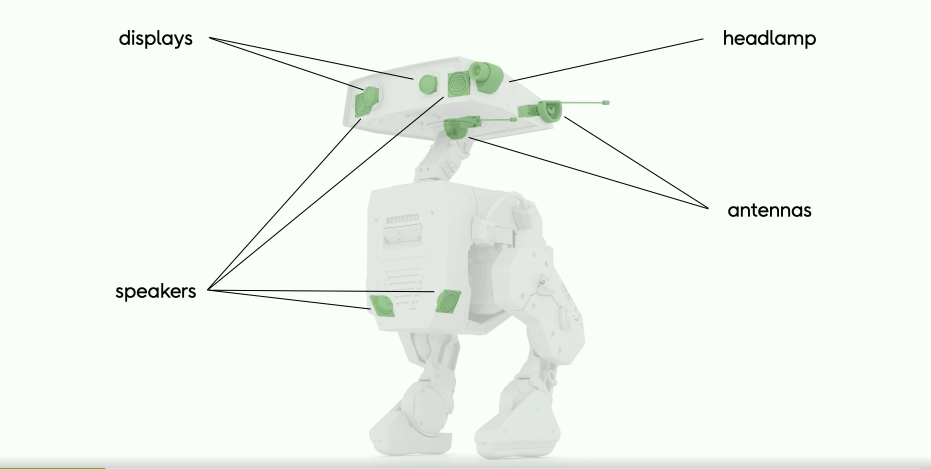
我们始终从角色入手。科技只是工具——我们用它来服务于故事和情感。对于BDX,这意味着要思考角色如何移动、如何表达情感,以及游客如何与他们进行有意义的互动。从他们的身体比例,到头部倾斜的方式,再到双脚落地的方式,我们精心设计,力求营造逼真的氛围。此外,我们还加入了人性化的元素:幕后木偶师将角色的细微变化展现得淋漓尽致,让角色栩栩如生。
在迪士尼,我们打造的并非工厂或配送中心的机器人——我们打造的是能让你拥有情感的机器人。这是一个截然不同的挑战。我们正在将情商引入机器人领域,并且正在大规模推进。在此过程中,我们与更广泛的机器人社区分享新的思维方式。这提醒我们,这个行业的未来不仅仅在于机器人能做什么,而在于它们能成为什么样的人。
强化学习让我们能够实现一些令人惊叹的成就:在实际制造机器人之前,我们可以在模拟环境中训练数百个版本的机器人。这意味着更快的迭代速度、更智能的移动方式,以及更多时间专注于真正重要的事情——创造一个引人入胜的角色。它缩短了从创意到情感联系的路径,这对于我们这些故事讲述者来说意义非凡。
BDX 完美诠释了我们的理念:故事至上,科技服务于故事。创新之处在于,我们现在能够在实时、面向宾客的环境中展现出更佳的响应能力、更逼真的肢体语言和更迷人的魅力。这并非噱头或昙花一现的瞬间——而是一个不断发展的角色平台。而我们才刚刚起步。
英伟达牛顿开源物理引擎
迪士尼正在利用一款名为“牛顿”(Newton)的全新人工智能物理引擎来增强其下一代机器人角色,包括迪士尼乐园里的BDX机器人。“牛顿”由迪士尼研究院、NVIDIA和谷歌DeepMind合作开发,旨在提升机器人的模拟能力和性能。
Newton 是一个开源物理引擎,旨在帮助机器人在复杂环境中学习和操作。迪士尼幻想工程正在利用这个平台改进其机器人角色的移动、互动以及与游客互动的方式。
Newton 引擎基于 NVIDIA Warp 构建,该系统利用 NVIDIA GPU 技术加速机器人模拟。它还集成了 MuJoCo-Warp,后者是一款专为处理复杂机器人动力学而设计的物理引擎,可实现更快、更精确的运动。
GR00T N1
GR00T N1 模型作为基础工具提供,全球开发者可以对其进行预训练,以用于各种机器人应用。NVIDIA 创始人兼首席执行官黄仁勋表示:“通用机器人的时代已经到来。借助 NVIDIA Isaac GR00T N1 以及全新的数据生成和机器人学习框架,世界各地的机器人开发者将开启 AI 时代的下一个前沿。”
GR00T N1 模型采用受人类认知启发的双系统架构。“系统 1”模拟类似于人类反射的直觉动作,而“系统 2”则借助视觉语言模型,允许进行更慢、更周到的决策。系统 1 从人类演示数据和通过 NVIDIA Omniverse 平台生成的合成数据中进行学习。
Agility Robotics、Boston Dynamics、Mentee Robotics 和 NEURA Robotics 等领先的机器人公司都是 GR00T N1 的早期采用者。
BDX内部结构
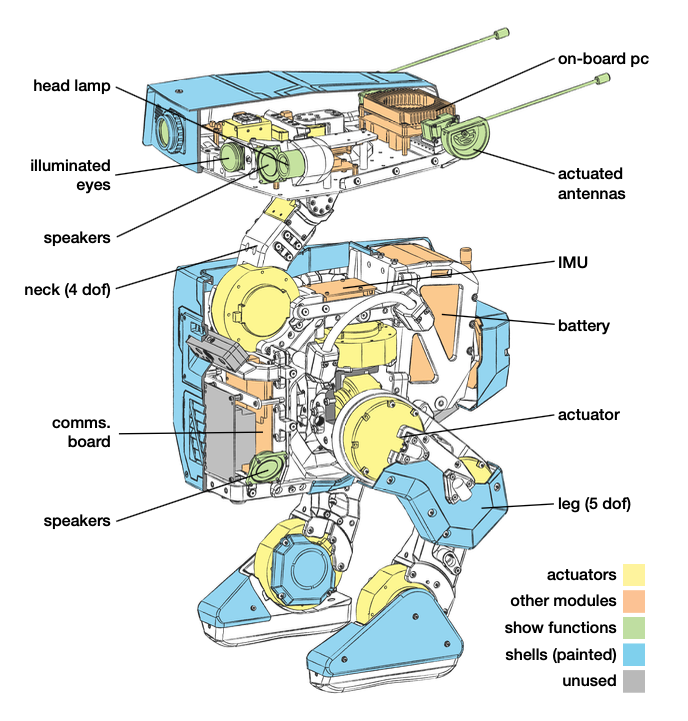
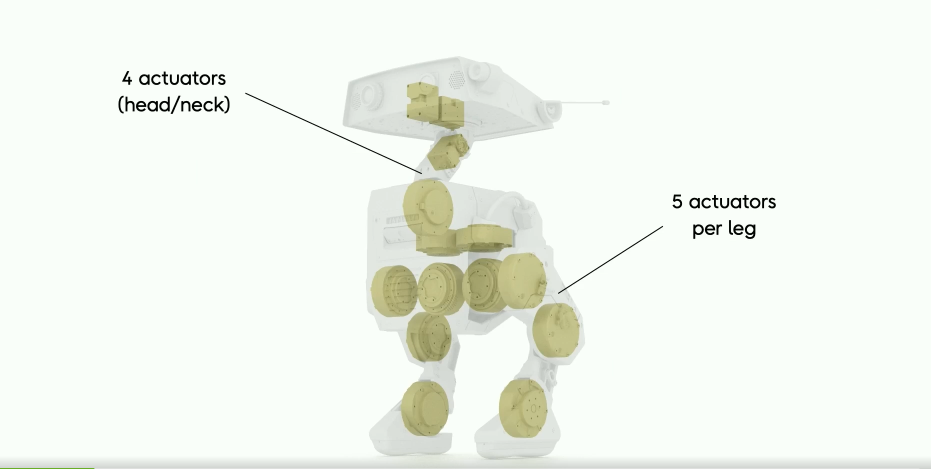
从机械结构看,每个腿有5 个自由度,脖子和头有4个自由度,头上的天线有一个自由度。
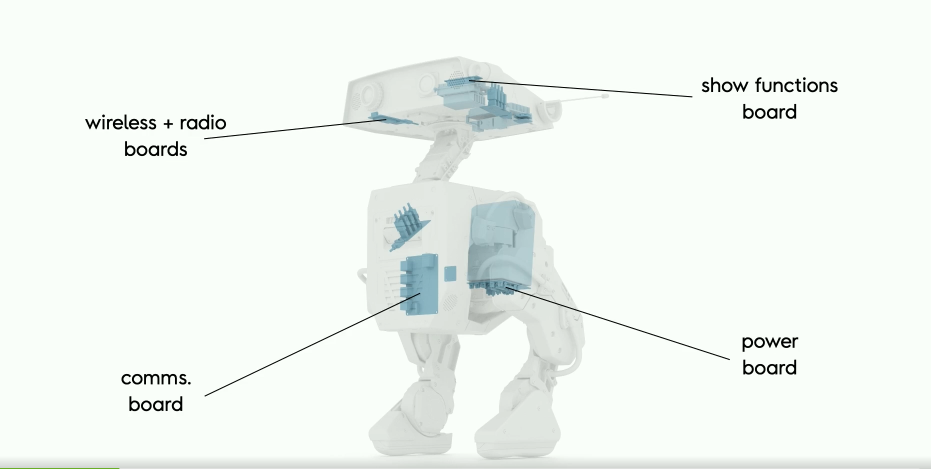
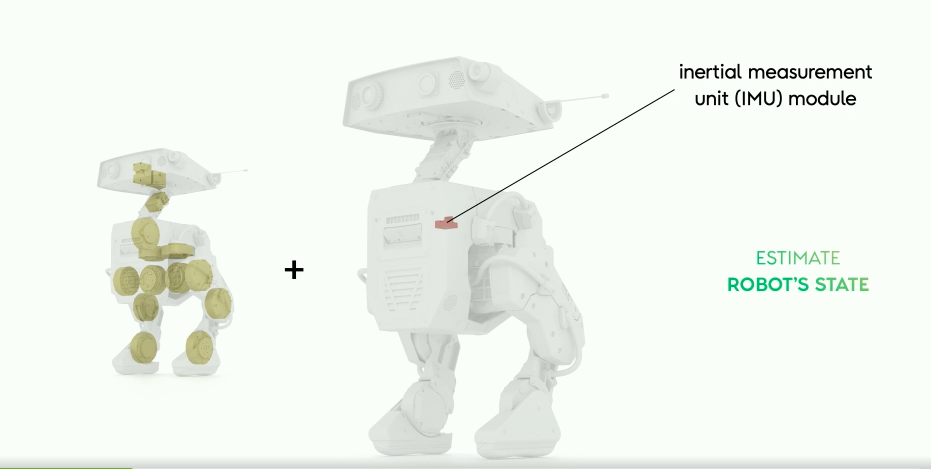
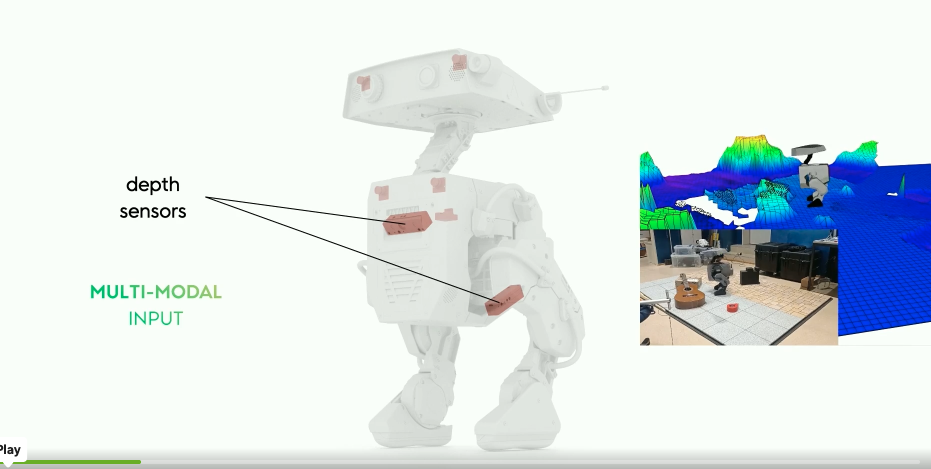
内部有一个通信板,一个电池模块,一个IMU,两台英伟达jetson 计算机放置在头部。一个无线接收机(低功耗LoRa),连接遥控器,两个深度传感器。
一些细节


其它一些数据
总重量 15.4 公斤,其中:
躯干部分5.8公斤
脖子和头2.4 公斤
每条腿 3.6 公斤
高度: 0.66 米
膝盖 峰值扭矩:34Nm,速度 20rad
脖子 峰值扭矩 24Nm
使用两种执行器
半直驱驱动器(Quasi Direct Drive)通常是无刷电机+行星减速机结构