【ROS2】ROS开发环境配置——vscode和git
古月21讲-ROS2/1.系统架构/1.5_ROS2开发环境配置/
ROS机器人开发肯定离不开代码编写,课程中会给大家提供大量示例源码,这些代码如何查看、编写、编译
安Linux中安装装git
sudo apt install git
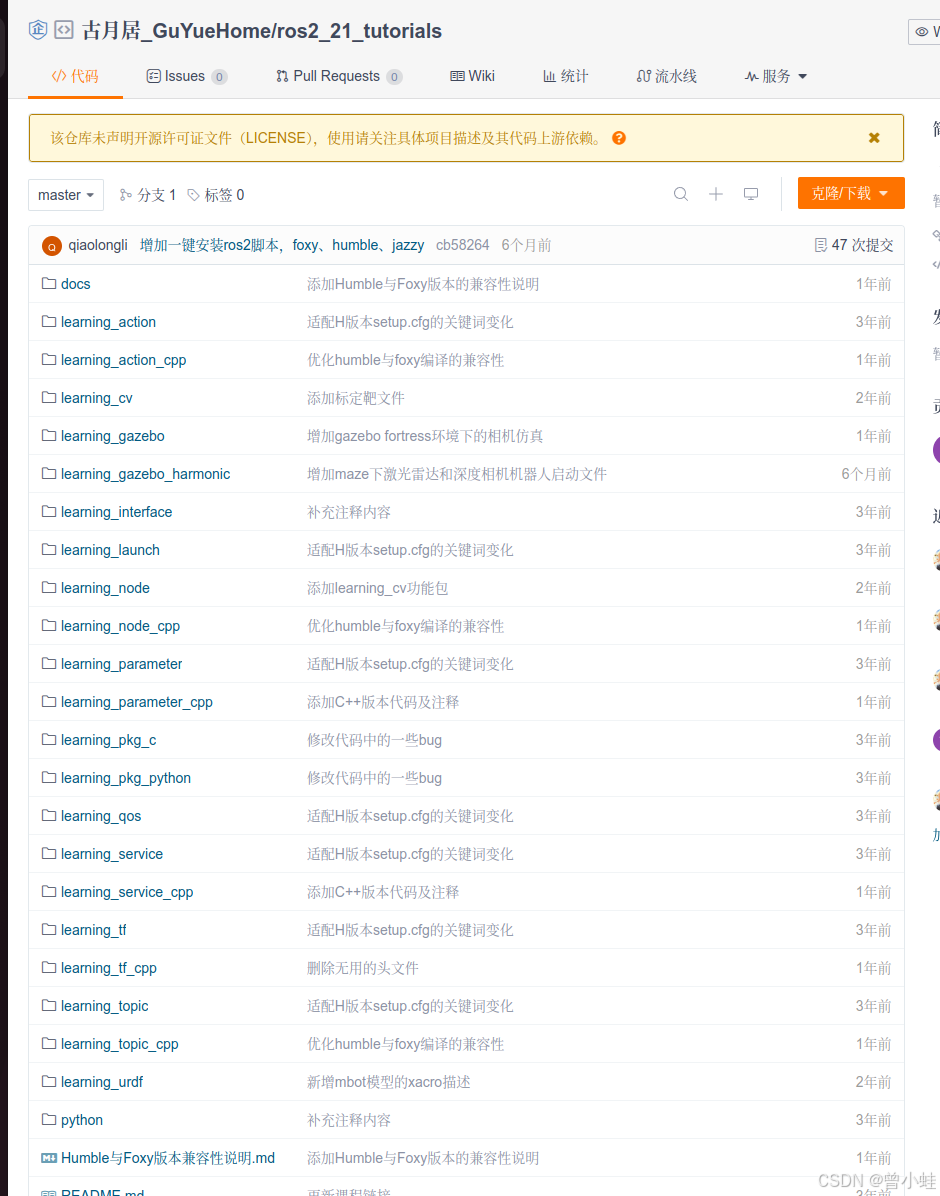
下载教程源码
《ROS2入门21讲》课程源码的下载方式:
git clone https://gitee.com/guyuehome/ros2_21_tutorials.git
安装vscode
Visual Studio Code,简称VSCode,是微软在2015年推出的一个轻量但功能强大的源代码编辑器,支持 Windows、Linux和 macOS操作系统,扩展组件非常丰富
下载链接:https://code.visualstudio.com/Download
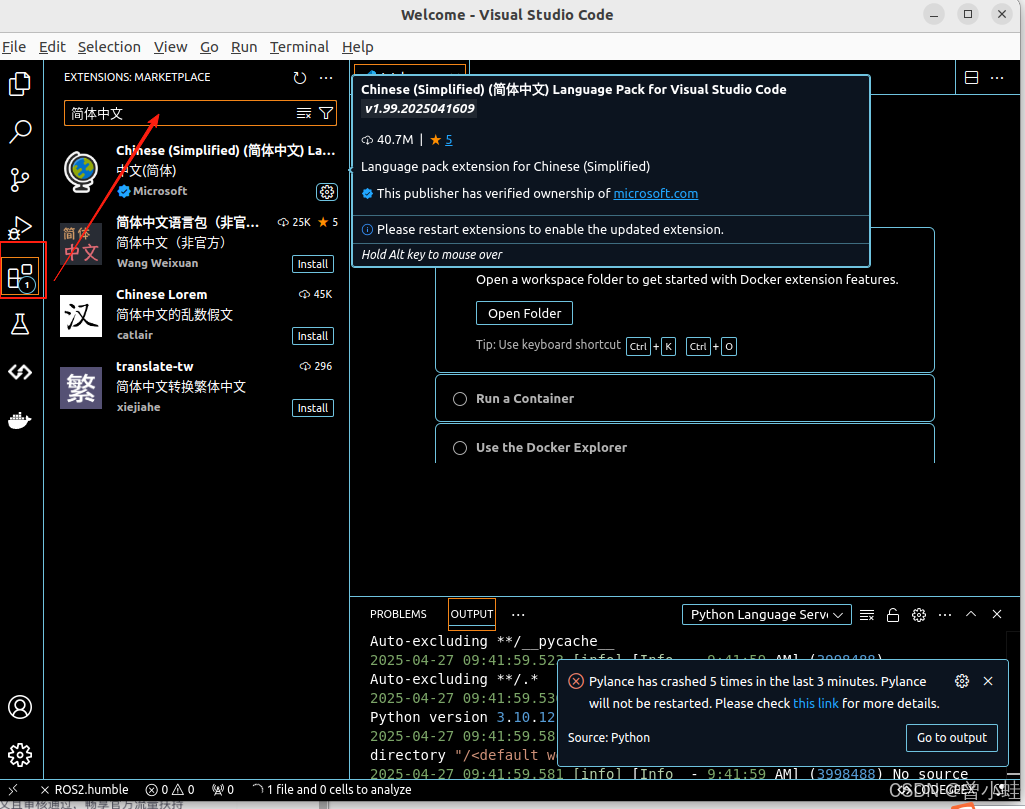
安装插件
在侧边栏中搜索安装,下列插件,用于后续开发,还可以无线添加
简体中文
Python
C++
CMake、
vscode-icons
ROS
Msg Language Support
intelliCode
URDF
Markdown All in One
插件简介
- 简体中文 - VSCode 中文语言包,汉化界面。
- Python - Python开发支持,含调试、智能补全、Jupyter 集成。
- C++ - C/C++ 开发工具,提供 IntelliSense、调试和
- CMake 支持。 CMake - CMake 项目构建工具,支持语法高亮、配置和调试。
- vscode-icons -文件图标美化,提升项目结构可视化。
- ROS - ROS 开发支持,含节点调试、消息和 Launch 文件语法。
- Msg Language Support - ROS .msg/.srv 文件语法高亮和补全。
- IntelliCode - AI智能代码补全,支持多种语言。
- URDF - 机器人 URDF 文件支持,用于 ROS 仿真建模。
- Markdown All in One - Markdown 增强工具,支持目录、公式和导出。导出为 HTML/PDF,支持实时预览同步滚动
插件安装界面
查看已安装插件
可根据自己开发情况