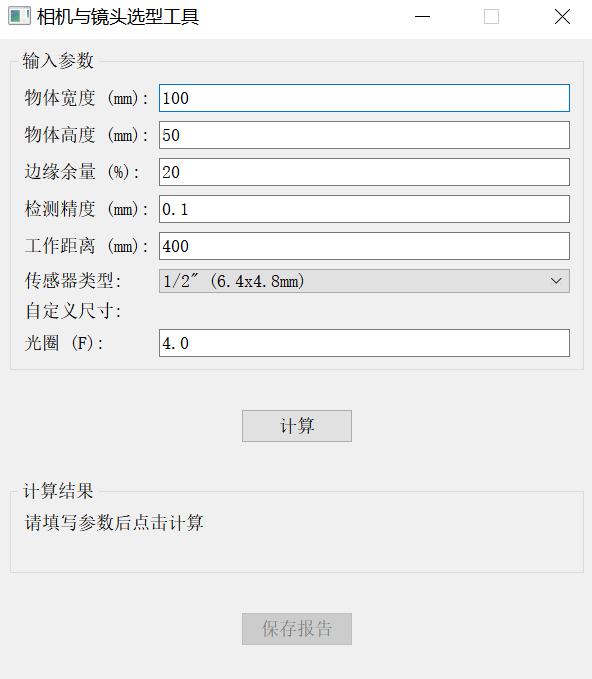
用python写一个相机选型的简易程序
最近有点忙,上来写的时间不多。
今天就把之前写的一个选型的简易程序,供大家参考。
代码:
import sys
from PyQt5.QtWidgets import (QApplication, QMainWindow, QWidget, QVBoxLayout, QHBoxLayout,QLabel, QLineEdit, QPushButton, QGroupBox, QFormLayout,QComboBox, QFileDialog, QMessageBox)
from PyQt5.QtCore import Qtclass CameraLensCalculator(QMainWindow):def __init__(self):super().__init__()self.setWindowTitle("相机与镜头选型工具")self.setFixedSize(600, 650)# 主窗口布局central_widget = QWidget()self.setCentralWidget(central_widget)main_layout = QVBoxLayout(central_widget)# 输入参数区域self.setup_input_group()main_layout.addWidget(self.input_group)# 计算按钮self.calculate_btn = QPushButton("计算", clicked=self.calculate)main_layout.addWidget(self.calculate_btn, alignment=Qt.AlignCenter)# 结果显示区域self.setup_result_group()main_layout.addWidget(self.result_group)# 保存按钮self.save_btn = QPushButton("保存报告", clicked=self.save_report)self.save_btn.setEnabled(False)main_layout.addWidget(self.save_btn, alignment=Qt.AlignCenter)# 设置默认值self.set_default_values()def setup_input_group(self):"""初始化输入参数区域"""self.input_group = QGroupBox("输入参数")layout = QFormLayout()# 物体尺寸self.obj_width = QLineEdit()self.obj_height = QLineEdit()layout.addRow(QLabel("物体宽度 (mm):"), self.obj_width)layout.addRow(QLabel("物体高度 (mm):"), self.obj_height)# 边缘余量self.margin = QLineEdit()layout.addRow(QLabel("边缘余量 (%):"), self.margin)# 检测精度self.accuracy = QLineEdit()layout.addRow(QLabel("检测精度 (mm):"), self.accuracy)# 工作距离self.working_distance = QLineEdit()layout.addRow(QLabel("工作距离 (mm):"), self.working_distance)# 传感器类型(下拉选择)self.sensor_combo = QComboBox()self.sensor_combo.addItems(["1/2\" (6.4x4.8mm)","1/1.8\" (7.2x5.3mm)","2/3\" (8.8x6.6mm)","自定义"])self.sensor_combo.currentTextChanged.connect(self.handle_sensor_change)layout.addRow(QLabel("传感器类型:"), self.sensor_combo)# 自定义传感器尺寸(默认隐藏)self.sensor_custom = QLineEdit()self.sensor_custom.setPlaceholderText("输入宽x高(如 10.0x8.0)")self.sensor_custom.setVisible(False)layout.addRow(QLabel("自定义尺寸:"), self.sensor_custom)# 光圈值(景深计算用)self.aperture = QLineEdit()self.aperture.setPlaceholderText("F值(如 2.8)")layout.addRow(QLabel("光圈 (F):"), self.aperture)self.input_group.setLayout(layout)def setup_result_group(self):"""初始化结果显示区域"""self.result_group = QGroupBox("计算结果")self.result_label = QLabel("请填写参数后点击计算")self.result_label.setAlignment(Qt.AlignLeft)self.result_label.setStyleSheet("font-family: monospace;")layout = QVBoxLayout()layout.addWidget(self.result_label)self.result_group.setLayout(layout)def handle_sensor_change(self, text):"""切换传感器类型时显示/隐藏自定义输入框"""self.sensor_custom.setVisible(text == "自定义")def set_default_values(self):"""设置默认参数值"""self.obj_width.setText("100")self.obj_height.setText("50")self.margin.setText("20")self.accuracy.setText("0.1")self.working_distance.setText("400")self.aperture.setText("4.0")def calculate(self):"""执行计算逻辑"""try:# 获取输入值obj_w = float(self.obj_width.text())obj_h = float(self.obj_height.text())margin = float(self.margin.text()) / 100 # 转为小数accuracy = float(self.accuracy.text())wd = float(self.working_distance.text())aperture = float(self.aperture.text()) if self.aperture.text() else 4.0# 解析传感器尺寸sensor_text = self.sensor_combo.currentText()if sensor_text == "自定义":sensor_w, sensor_h = map(float, self.sensor_custom.text().split('x'))else:sensor_str = sensor_text.split('(')[1].split(')')[0].replace('mm', '')sensor_w, sensor_h = map(float, sensor_str.split('x'))# 计算FOV(含余量)fov_w = obj_w * (1 + margin)fov_h = obj_h * (1 + margin)# 计算分辨率(安全系数1.5)res_w = int((fov_w / accuracy) * 1.5)res_h = int((fov_h / accuracy) * 1.5)mp = (res_w * res_h) / 1e4 # 万像素# 计算焦距(公式:f = (WD * 传感器尺寸) / FOV)focal_w = (wd * sensor_w) / fov_wfocal_h = (wd * sensor_h) / fov_hfocal_length = max(focal_w, focal_h)# 计算景深(简化公式)coc = 0.005 # 容许模糊圆直径(默认0.005mm)depth_of_field = (2 * coc * aperture * (wd ** 2)) / (focal_length ** 2)# 显示结果result_text = f"""=== 计算结果 ===视场(FOV): {fov_w:.2f} mm × {fov_h:.2f} mm所需分辨率: {res_w} × {res_h} 像素推荐相机: ≥ {mp:.1f} 万像素镜头焦距: ≈ {focal_length:.1f} mm景深(DoF): ≈ {depth_of_field:.2f} mm(基于传感器: {sensor_w}x{sensor_h} mm, 光圈 F{aperture})"""self.result_label.setText(result_text.strip())self.save_btn.setEnabled(True)self.calculation_result = result_text # 保存结果用于导出except Exception as e:QMessageBox.warning(self, "错误", f"参数输入无效!\n{str(e)}")def save_report(self):"""保存计算结果到文件"""try:file_path, _ = QFileDialog.getSaveFileName(self, "保存报告", "", "Text Files (*.txt);;All Files (*)")if file_path:with open(file_path, 'w') as f:f.write("=== 相机与镜头选型报告 ===\n")f.write(f"物体尺寸: {self.obj_width.text()}x{self.obj_height.text()} mm\n")f.write(f"边缘余量: {self.margin.text()}%\n")f.write(f"检测精度: {self.accuracy.text()} mm\n")f.write(f"工作距离: {self.working_distance.text()} mm\n")f.write(f"传感器: {self.sensor_combo.currentText()}\n")f.write(f"光圈: F{self.aperture.text()}\n")f.write("\n" + self.calculation_result.strip())QMessageBox.information(self, "成功", "报告已保存!")except Exception as e:QMessageBox.critical(self, "错误", f"保存失败!\n{str(e)}")if __name__ == "__main__":app = QApplication(sys.argv)window = CameraLensCalculator()window.show()sys.exit(app.exec_())
以上对选型提供初步的想法,具体可以根据个人需求进一步优化。